3DGS+合成数据,真能让自动驾驶告别“长尾场景焦虑”吗?

一、引言
在自动驾驶与具身智能的发展历程中,数据一直是制约模型能力的重要因素。目前,Waymo的自动驾驶数据累计达3200万公里,特斯拉车队的回传数据都是PB级的,但自动驾驶数据还是缺乏。这揭示了一个真相:真实世界的数据获取正遭遇边际收益递减的困局。
随着模型参数规模的指数级膨胀,我们面临一个核心矛盾——AI 极度渴求长尾场景,而真实世界的试错代价是不可逆的。这一瓶颈促使 AI 基础设施正在发生一场深刻的范式转移:从“被动采集真实世界”,转向“主动构建虚拟世界”。
3D Gaussian Splatting与虚拟合成数据,正是这场革命的两大驱动力。针对上述矛盾,本文将从仿真范式的三层演进出发,系统拆解3DGS如何以显式表达打破传统仿真的真实感瓶颈,并进一步阐述合成数据如何形成“采集—重建—扰动—闭环”的工业级流水线,最终降低标注成本、压缩Sim-to-Real鸿沟。
二、AI 仿真的范式更迭

3DGS技术原理图
当前,AI 仿真不仅是物理引擎的简单堆砌,它已演变为三层的复杂系统:物理仿真(牛顿世界)、传感器仿真(像素世界)以及行为仿真(社会世界)。
长期以来,AI 仿真受困于4个问题:高昂的标注成本、难以捕捉的长尾场景、数据隐私的合规壁垒,以及物理试错的风险。传统游戏引擎虽然提供了极高的可控性,但保真性弱的视觉表现使得 Sim-to-Real 的鸿沟难以跨越。
为了解决这一问题,三种技术路径正在融合:引擎仿真(强交互)、神经渲染重建(高真实感)以及生成式 AI(广扩展性)。而 3DGS 的横空出世,恰恰成为了将三者串联起来的关键组件。
三、3DGS:让世界成为“可计算资产”
1、3DGS技术原理
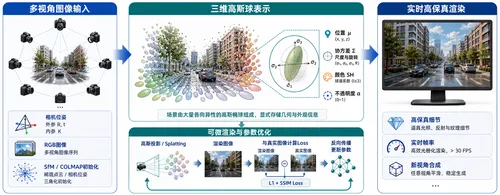
3DGS技术原理图
2023 年发布的 3DGS,标志着神经渲染从学术界正式迈向工业界。与 NeRF 的隐式黑盒不同,3DGS 采用了一种极其巧妙的显式表达:将整个世界拆解为数百万个发光的“3D 高斯椭球”。
(1)实时性:3DGS 放弃了昂贵的神经网络体渲染,通过图形学中经典的“Splatting”技术,实现了 100+ FPS 的实时渲染。
(2)显式表达:由于每个高斯基元都携带位置、旋转、缩放与颜色参数,这意味着场景不再是一个无法修改的“整体”,而是可以像粒子系统一样被编辑、裁剪、拼接与二次创作。
这种“显式性”赋予了工业生产巨大的灵活性。对于自动驾驶公司而言,3DGS 不再仅仅是视觉重建工具,它已进化为一种“数字孪生语料”。工程师可以在已重建的街景中任意插入障碍物、改变天气条件,或模拟极端光照下的传感器反馈,从而生成高质量、带标注、且极其接近真实分布的训练数据。
2、康谋3DGS仿真应用
(1)构建丰富的ODDs
利用3DGS技术,能快速搭建出不同的仿真环境,并基于aiSim仿真平台进行自动驾驶仿真测试。以下是aiSim中的实机演示画面,场景都是用3DGS生成。

(左)城区、(中)泊车、右(测试场地)
(2)量化验证
我们对3DGS生成的场景做了不同方式的测试,以确保3DGS的仿真画面是高度逼真的,与现实世界的画面特征高度重合。
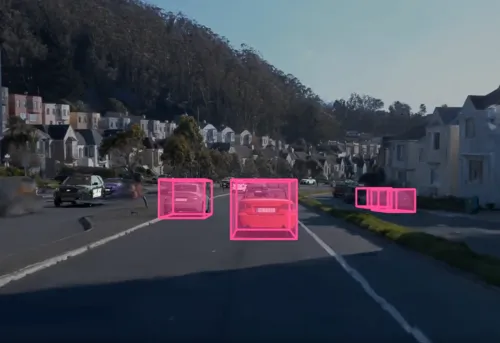
①基于DEVIANT算法验证
DEVIANT是单目3D目标检测算法,我们将该算法应用到仿真的3DGS画面和真实画面,算法都能进行正常的识别任务,说明3DGS没有引入明显的领域差异。
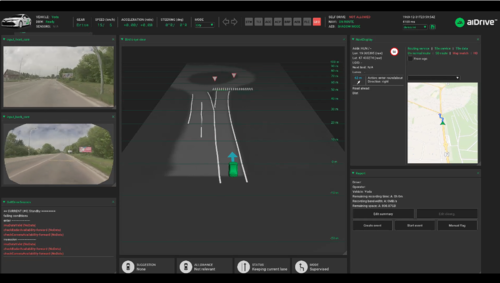
②端到端测试验证
在3DGS环境中进行智驾的闭环测试,即便在偏离原始数据采集轨迹的全新路径上,依然能够自主行驶。这说明在aiSim的3DGS环境中能够进行闭环驾驶验证,从而打通了端到端的智驾测试验证。
在3DGS环境中进行实时智驾测试画面:
四、合成数据的工业闭环
在 3DGS 的加持下,合成数据流水线发生了一次从“生成”到“编程”的跃迁。传统的仿真依赖大量美术建模,周期长且真实感存疑;而 3DGS 路径下的资产生产流程简洁高效:多视角采集 → 3DGS 训练 → 场景扰动 → 数据自动导出。
构建流程:
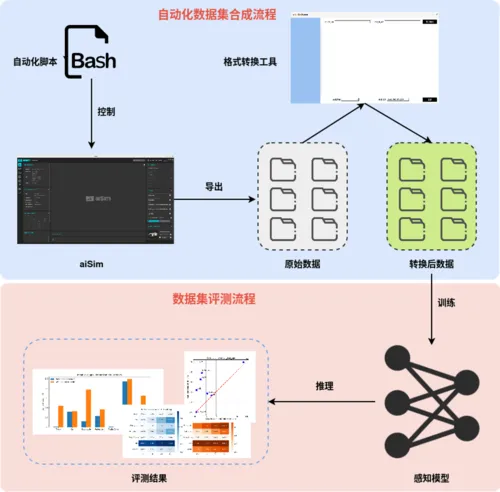
这种路径带来了三个关键优势:
(1)特征一致性:场景底层的几何与纹理源于真实拍摄,从源头上压缩了 Sim-to-Real 的性能掉点。
(2)仿真闭环:通过对历史真实事故数据的重建与扰动,AI 可以进行重复的极限测试,让算法在“虚拟现场”中自我纠错。
(3)标注成本降低:在虚拟空间中,深度图、语义分割、光流等数据皆为“生产副产品”,从而彻底减低了人工标注成本。
五、结语
未来,物理属性(材质、光照、形变)将深度耦合进 3DGS 系统中,使得虚拟世界不仅看起来,更能够符合物理特征。
这不仅是技术的升级,更是 AI 开发范式的重塑。借助 3DGS 技术与合成数据流水线,我们得以跳出对真实世界数据的被动依赖,转而主动构建贴合实际需求的虚拟仿真环境,高效推进场景迭代与算法优化。
AI 仿真的能力上限,本质上取决于我们构建世界的深度与广度。 从理解像素到构建世界,这场由 3DGS 与虚拟数据驱动的变革已经开始!
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
BodeCAD(Linear)
恩智浦第三代雷达收发器助力高性能成像雷达规模量产,赋能L2+至L4级自动驾驶
限制级发布!最新AI模型Claude Mythos“过于危险”
Ouster推出 Rev8 OS 激光雷达系列 原生彩色激光雷达正式落地
减少精密转换设计周期中的挑战
自动驾驶正推动汽车行业加速布局人形机器人
INA110快速扫描数据采集通道电路
基于AD芯片AD1674设计的数据采集电路
提供8通道模拟量数据采集系统的图纸和源代码
高光天审校:AD公司仪表放大器应用工程师指南2nd版
提供8通道模拟量数据采集系统的图纸和源代码
数据采集技术第一讲:DAQ基础知识简介
[转帖]I-Logix: 模型驱动开发理应有测试的一席之地
[原创]使用UML工具创建计数器的例子(2)模型仿真
2035年自动驾驶出租车市场规模将达1680亿美元
高盛CEO对Anthropic旗下Mythos模型发出警告
曲面显示屏取代传统汽车挡风玻璃
高阶智驾要落地,线控底盘为什么必须执行得准
实时训练驾驶人工智能
使用LabVIEW构建简易数据采集系统
Measurement Studio 8.0评估版软件
ISO122的低成本三端口、四通道隔离式数据采集系统电路
高速数据采集平台解说4
PWM放大器模型和波形
掘金自动驾驶,不要把大坑当机会
提供8通道模拟量数据采集系统的图纸和源代码
IGBT的VCR(压控电阻)等效电路模型
INA111构成的多路输入数据采集系统
PIC单片机应用问答14篇
数据采集技术第二讲:配置管理软件MAX