高压放大器在介电高弹聚合物叠层弯曲驱动器中的应用

实验名称:介电高弹聚合物叠层弯曲驱动器的建模与控制
实验目的:通过Hamilton原理与假设模态法建立弯曲驱动器大变形过程的动力学模型,并基于该动力学模型发展了相应的自适应控制方法,补偿驱动过程中的不确定性与非线性。实验结果证明了在动态弯曲过程中相关控制策略的性能。
测试设备:高压放大器、激光位移传感器,控制板卡设备等。
实验过程:
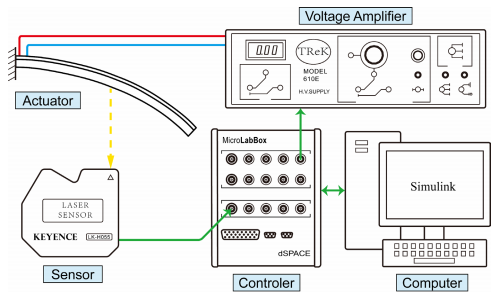
图1:叠层弯曲驱动器实验设置示意图
实验设置如图1所示。一个完整的控制流程如下:激光位移传感器测量当前弯曲驱动器的垂直位移,并将实时数据发送给控制板。控制板对位移信号进行采样,并利用插值计算对采样信号进行处理,消除驱动器水平位移的影响。速度信号则通过对相邻位移测量值进行差分运算得到,加速度信号同理。控制板根据反馈信号计算出控制量后,将模拟控制信号发送至高压放大器。高压放大器将接收到的控制信号放大,变成输出在驱动器上的电压。此外,一台通用计算机作为上位机与控制板进行通信,用于控制参数调整与数据记录。该系统的控制频率设置为1kHz。
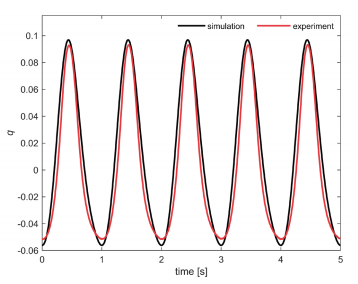
图2:参数识别实验结果,正弦激励下的位移-时间曲线
控制率式中有部分动力学参数需要进行参数辨识。参数辨识的初始值可以通过公式得到,然后进一步在Simulink软件中用仿真结果拟合实验数据以调节参数。最终得到的辨识结果。图2是输入电压信号为峰-峰值700v、频率1hz的偏置正弦波的参数识别结果,可以看出模拟结果(黑色曲线)与实验结果(红色曲线)吻合较好。最终标定出来的参数估计值会在实际控制过程中通过自适应律动态改变。
接下来,验证提出的控制器的性能。为了证明自适应律的有效性,下面的实验对比无参数自适应的控制器(C1)和有参数自适应的控制器(C2)的表现。
图3,4,5分别为跟踪正弦参考轨迹的频率为1Hz、1.5Hz和2Hz时,两个控制器的控制实验结果。可以看到,在1Hz情况下两个控制器产生的位移可以很好地跟踪参考轨迹,但C2的跟踪精度高于C1。而随着参考轨迹频率的增加,C2和C1之间的性能差距变得更大。即便C1的反馈增益
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
高压放大器ATA-2082在射流气液界面波动的超声波测量中的应用
泰克示波器和安泰功率放大器在高频MEMS驱动测试的应用
凌力尔特推出双向电流检测高压放大器 LT1999
ATA-2082高压放大器+示波器+信号源在驱动压电陶瓷的应用
高压放大器在通电空心线圈的脉冲磁场分析中的应用
多路高压放大器输出直流电压监测与显示系统设计
驱动压电管的高压放大器
高压放大器基于压电陶瓷损伤识别中的应用
凌力尔特推出高压放大器LT1999
ATA-2041高压放大器在基于导波的管道轴向应力测量实验中的应用
如何验证高压放大器的性能好坏呢
高压放大器ATA-2022H在压电陶瓷损伤识别中的应用
ATA-2041高压放大器在CFRP板分层缺陷的空耦超声原位测量中的应用
高压放大器基于干涉仪的设计与优化中的应用
免费样机使用!ATA-2031高压放大器
ATA-2021H高压放大器在扫描光纤激光器研究中的应用
高压放大器在电力线载波通信及高压监测中的应用
安泰高压放大器ATA-2161在无损运输中的应用
使用简化电路的高压放大器