
【检测目的】
先对机壳及薄片进行定位,然后两者组装贴合
【客户要求】
精度为0.1mm
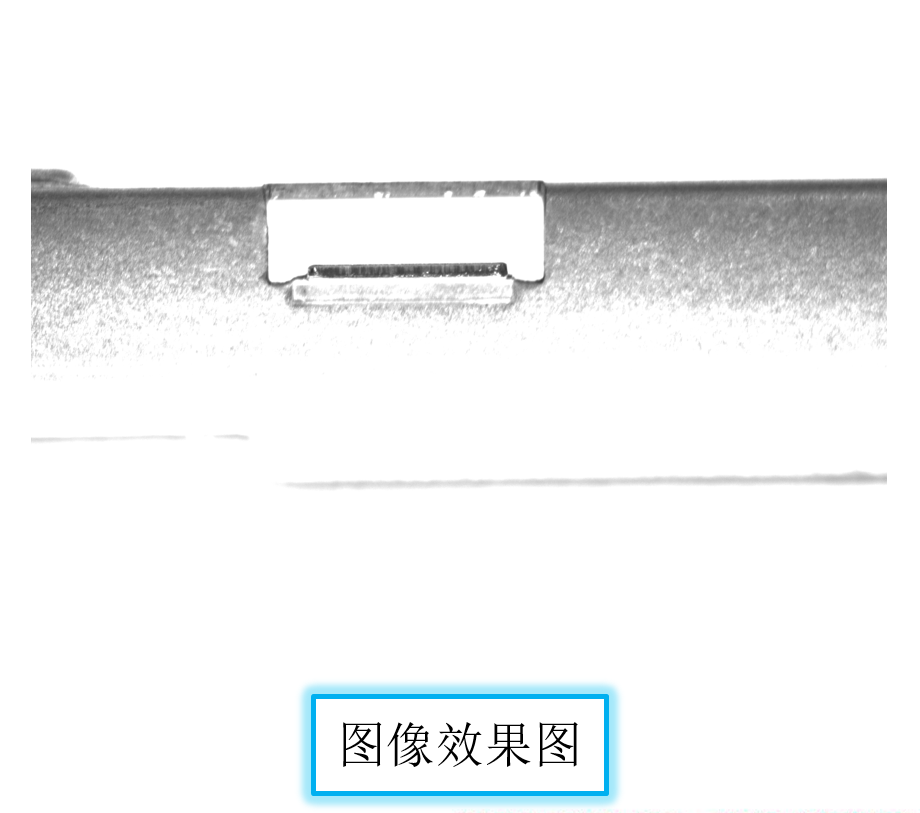
【拍摄与处理效图一】(大电视板)
用了12090环形光,线光,条光拍摄。光源亮度为A,底部是白纸
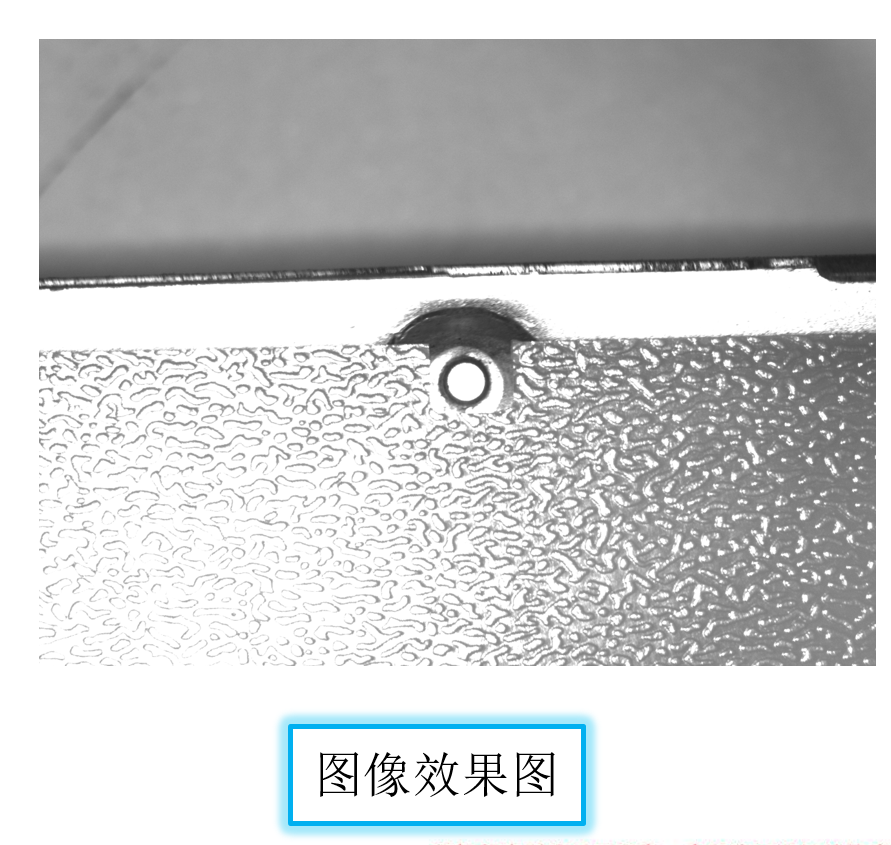
【拍摄与处理效图二】(大电视板)
用了12090环形光,线光,条光拍摄。光源亮度为A,底部是白纸
【拍摄与处理效图六】(小电视板)
只用了5090环形光拍摄,光源亮度为B
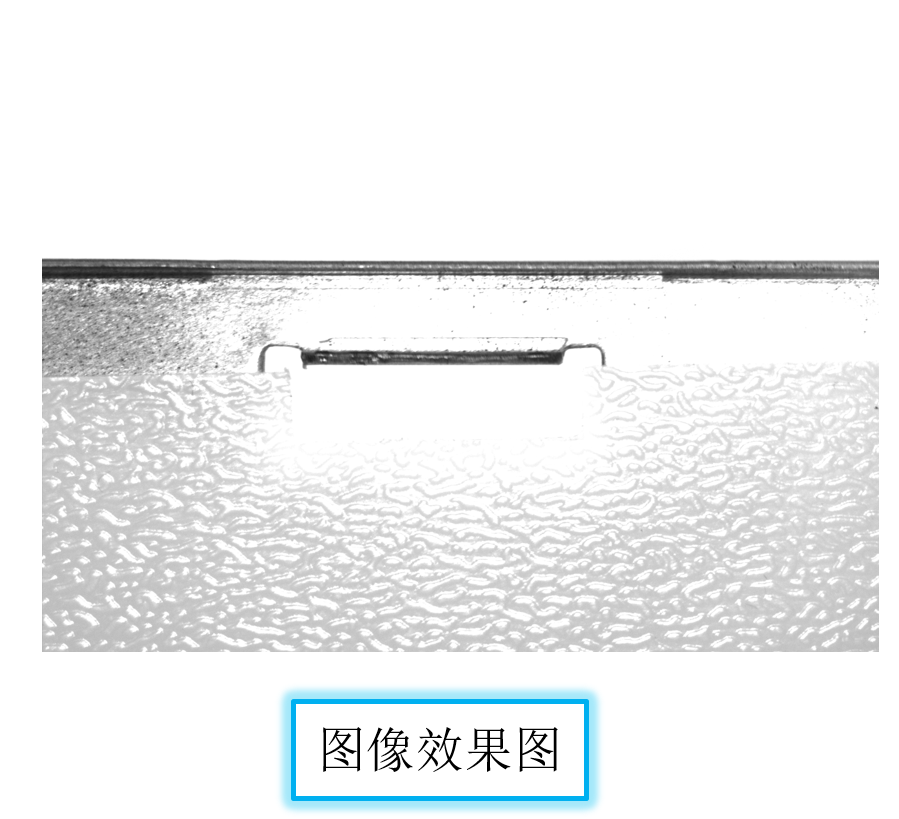
【拍摄与处理效图八】(小电视板)
用了5090环形光拍摄和条光,光源亮度为C,底部是白纸
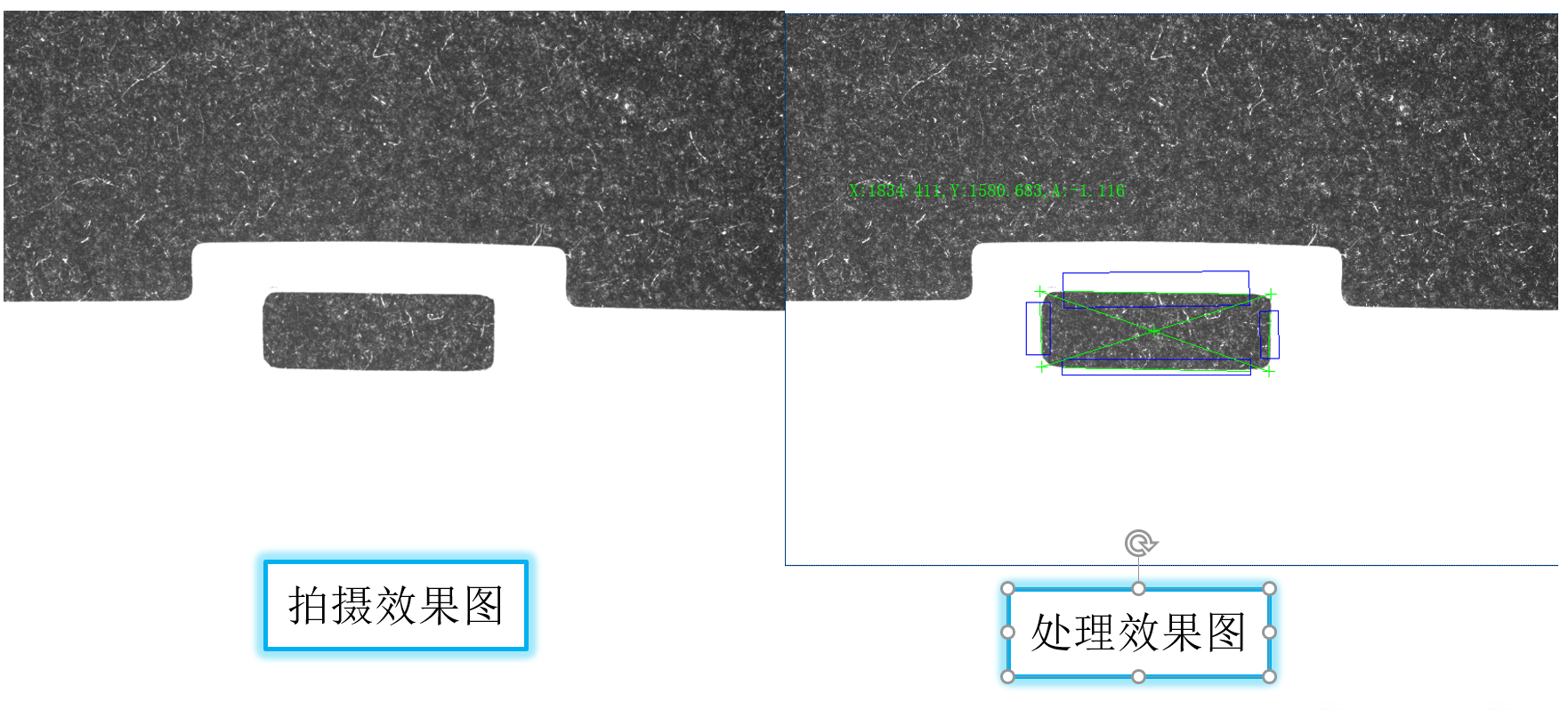
【拍摄与处理效图一】(薄片)
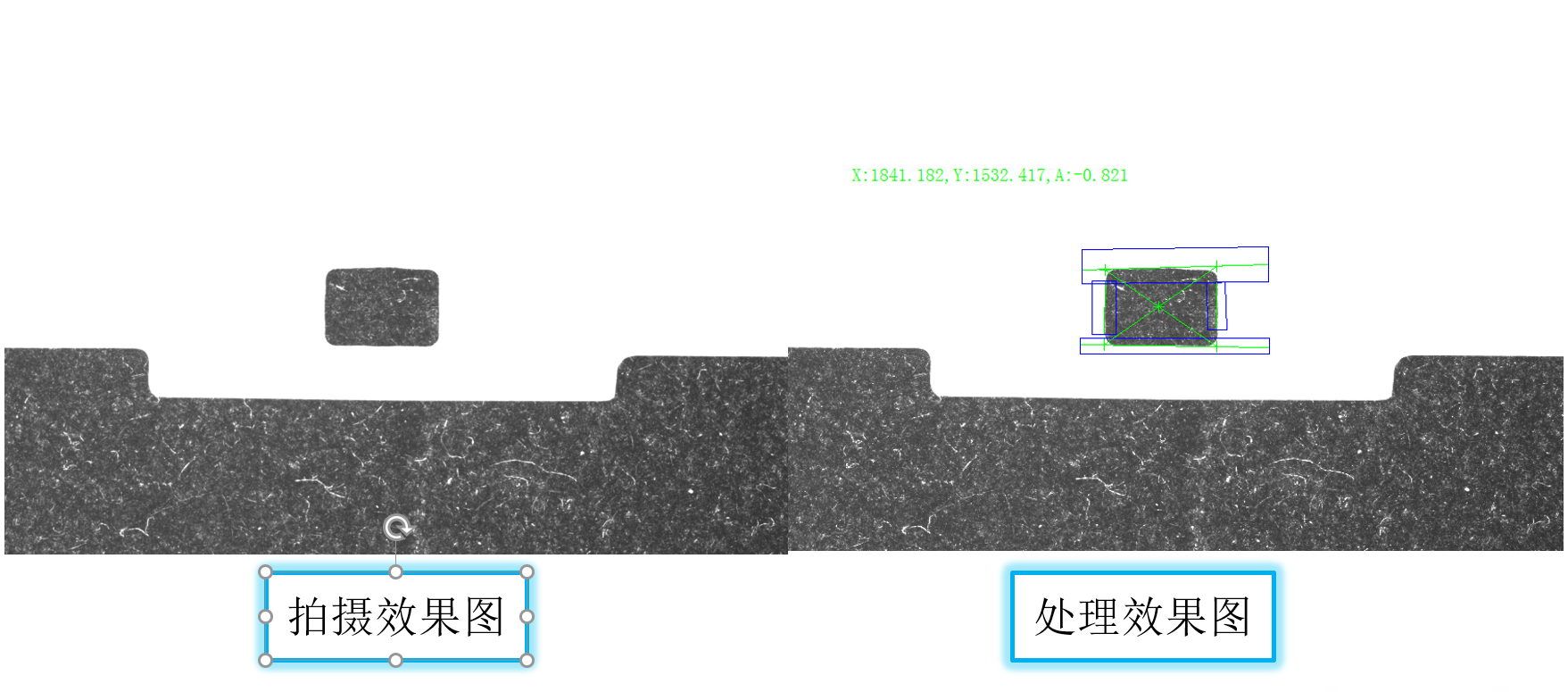
【拍摄与处理效图二】(薄片)
【方案评估】-机壳
外壳视野:40mm*30mm
视觉精度:40mm/2592pixel=0.0154mm/pixel。
【方案评估】-薄片
根据目前样品进行光学实验和处理结果来看,可以对薄片进行定位。本机器视觉定位系统方案是同时拍摄两点进行定位,所以需要两套硬件。
薄片视野:40mm*30mm
视觉精度:40mm/1292pixel=0.031mm/pixel
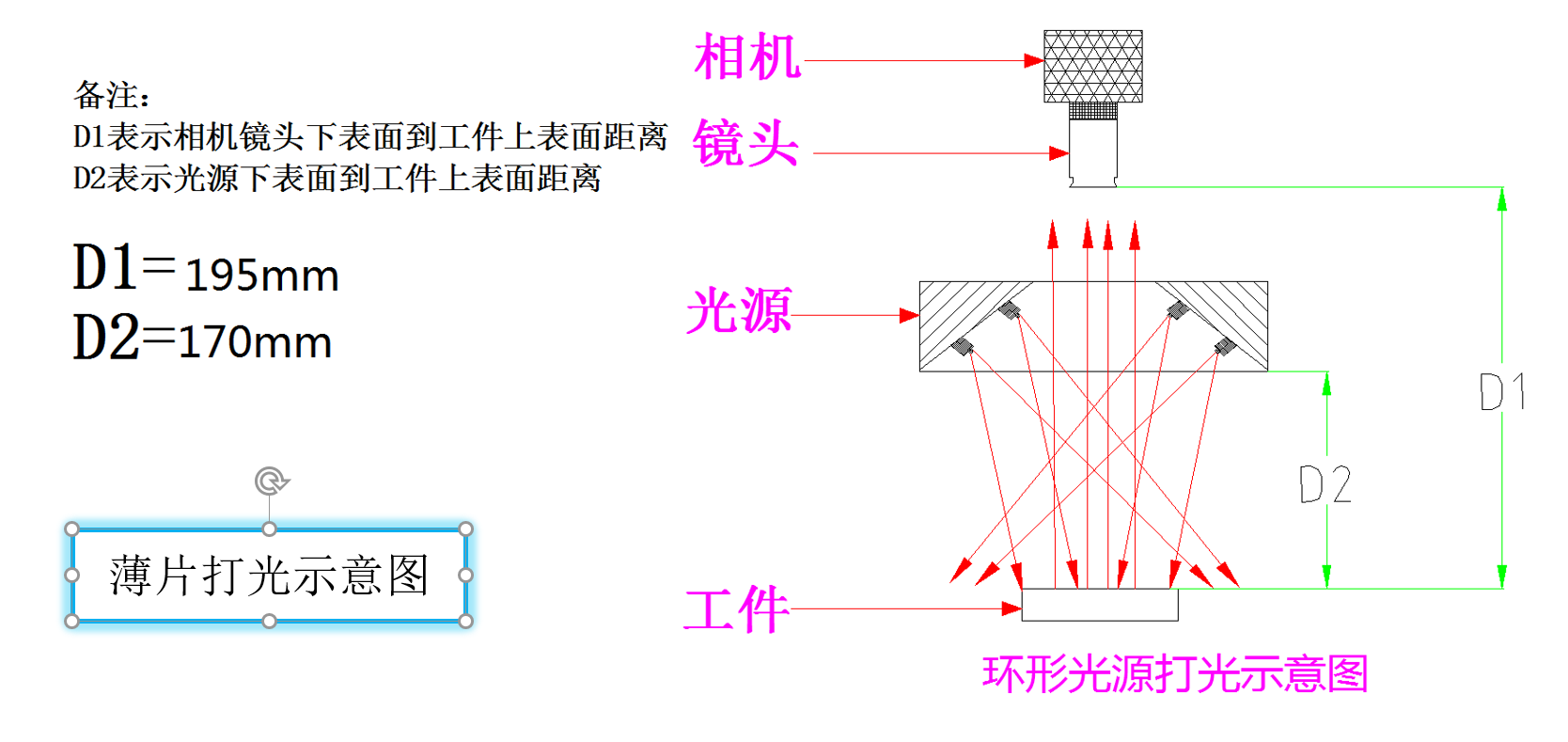
【安装示意图】
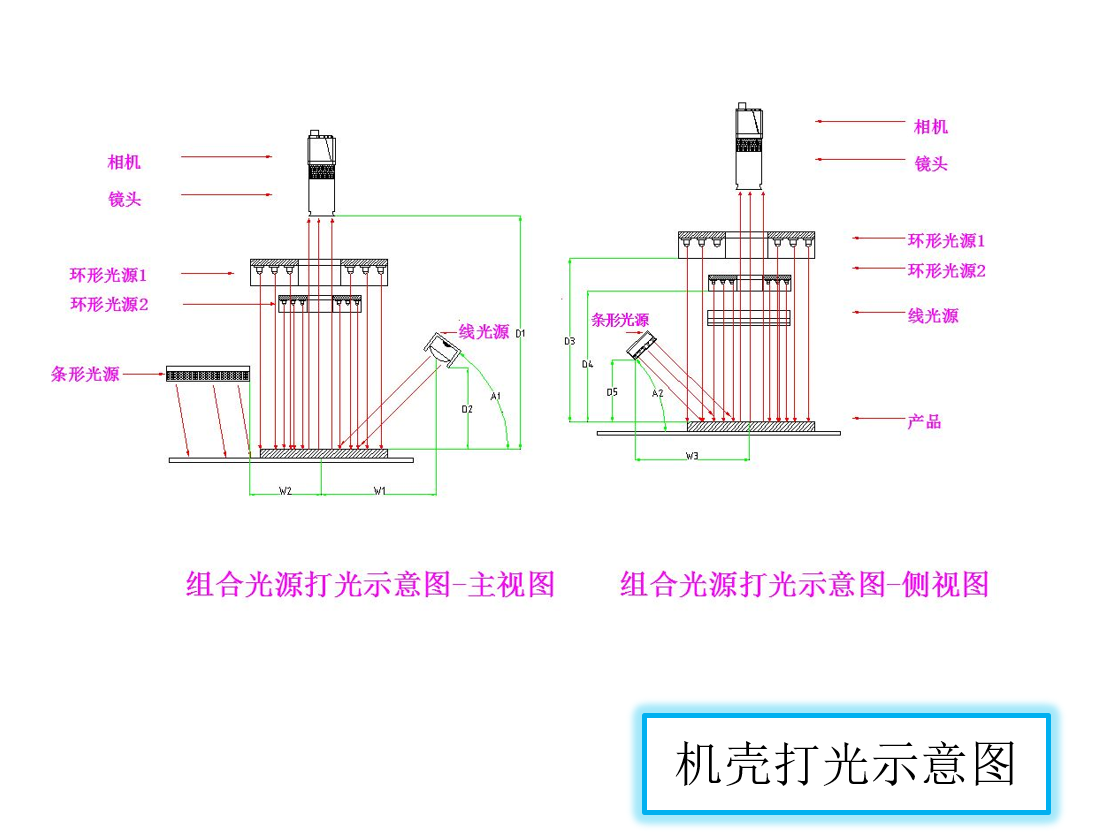
【安装示意图】
【硬件配置】(机壳)
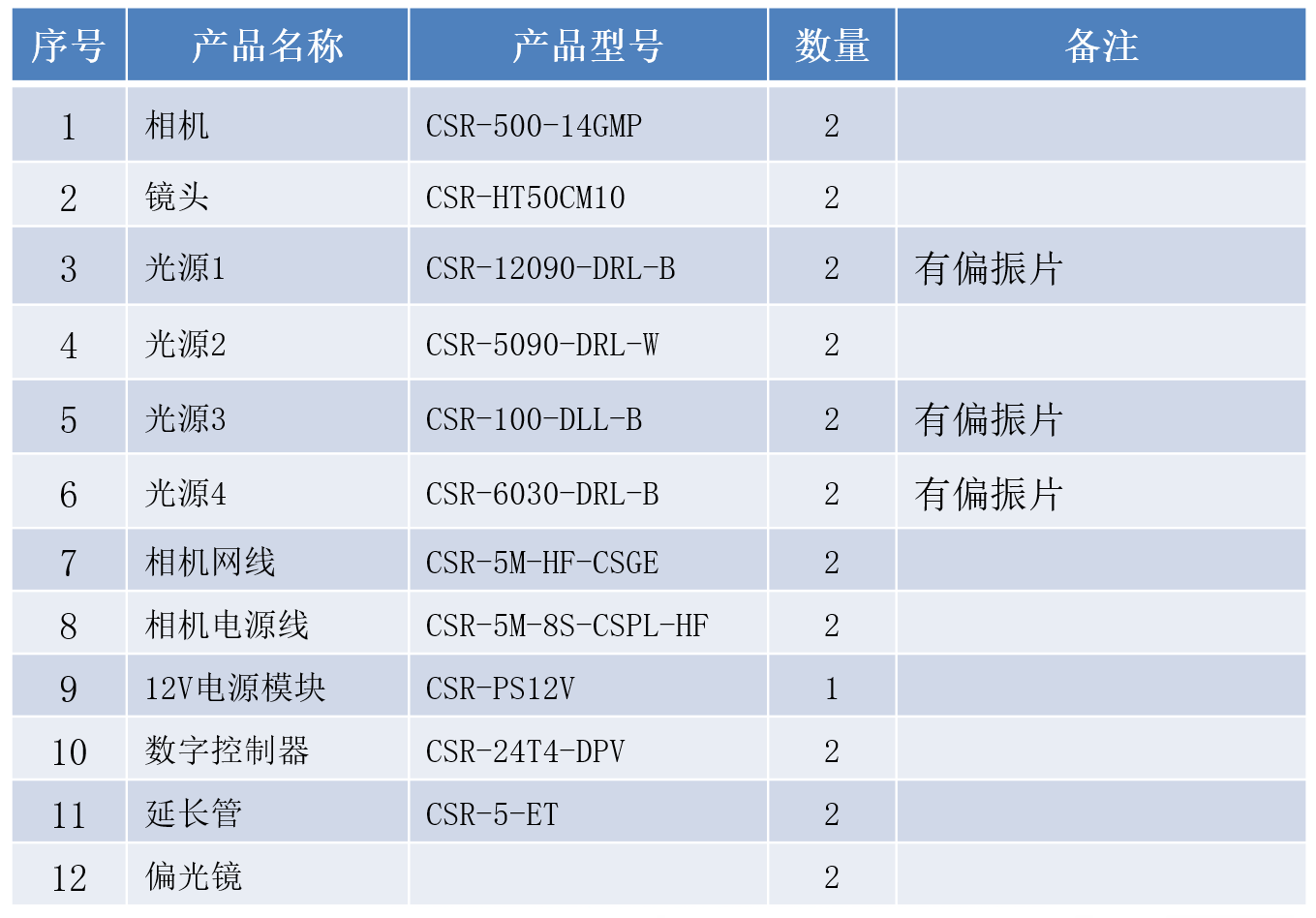
【硬件配置】(薄片)

相关推荐
图像采集卡是什么东西?
基于云端协同的产品包装外观质量检测系统*
基于特征匹配的芯片管脚视觉检测系统设计
AMD 锐龙嵌入式 7000 系列助力研华科技 Micro-ATX 主板
基于ARM+DSP的驾驶员眼部疲劳视觉检测算法设计
发动机曲轴非接触式自动检测系统的研制
图像传感器在包装盒内物体检测的应用
当6 TOPS不再是极限:米尔RK3576 + Hailo-8,让高帧率摄像头真正“实时”
视觉检测设备的崛起,助力医疗设备的发展
使用Cognex视觉定位替代传统的机械或者重力对中
高速工业相机:快节奏“慢放”,远距离“微视”
泛华恒兴推出综合视觉检测平台
煅造视觉检测的“火眼金睛”,Sherlock8可助一臂之力
移动机器人视觉定位方法的研究
一种非标定摄像机的定位新算法
基于机器视觉的变电站智能机器人的研制*