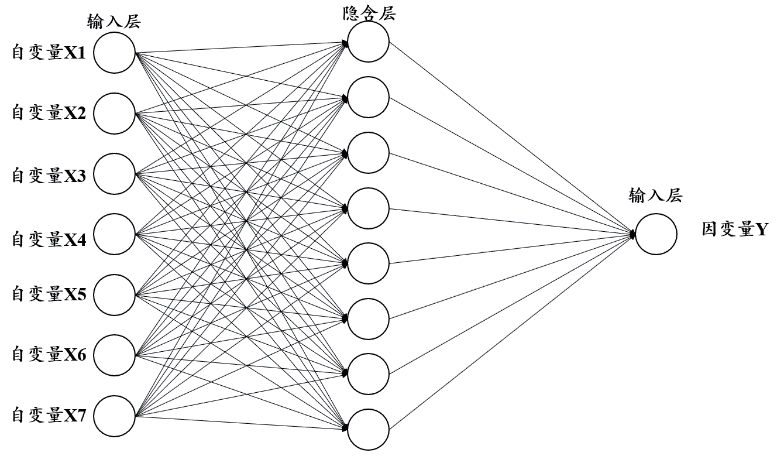
- 针对传统BP神经网络容易陷入局部最优的缺陷,以及基于遗传算法改进的BP神经网络仍有改进空间的问题,本文建立CS(chaotic sequence)-AGA(adaptive genetic algorithms)-BP(基于混沌序列的自适应遗传算法改进的神经网络)改进模型,改进分为两个方向:①交叉概率和变异概率采用自适应算法确定;②通过Logistic混沌序列对交叉位置进行确定,并进行多基因变异,选取美国波士顿房价数据集并按4:1比例设置训练数据与测试数据,对隐含层节点进行确定后,选取train训练函数。
- 关键字:
CS-AGA-BP 预测 房价 202212

- 1 引言PID控制原理简单,适应性强,容易实现,是机器人控制的常用方法,PID控制系统设计的核心内容是如何确定其比例系数Kp、积分常数Ti和微分常数Td的最优解。控制参数的选定直接影响仿人机器人控制系统的响应速度、
- 关键字:
参数 优化 控制 PID AGA 机器人 基于
aga介绍
您好,目前还没有人创建词条aga!
欢迎您创建该词条,阐述对aga的理解,并与今后在此搜索aga的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473