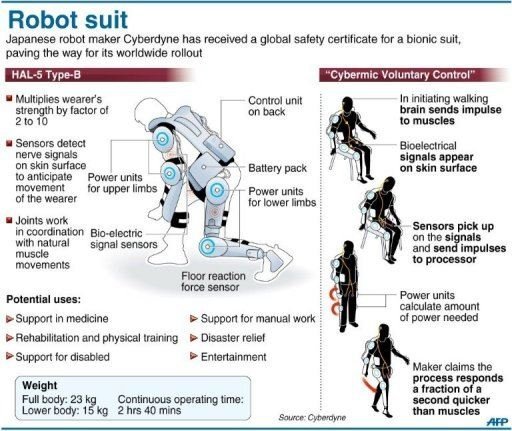
据国外媒体报道,一种能够帮助老年人或残疾人的机器服周三在日本获得了全球安全认证,从而为在全球发布铺平了道路。这种机器服即混合辅助肢体(HAL),是由日本机器人生产商Cyberdyne开发的动力辅助下肢,此外,该公司还开发出了类似的机器人手臂。
日本经济产业省表示,质量安全机构基于个人机器人国际安全标准草案发放了该安全证书,预计该草案将于今年晚些时候通过。日本经济产业省官员表示,金属和塑料外骨骼是根据该草案标准认证的首款护理机器人。
由电池供电的混合辅助肢体能够监
关键字:
机器人 电池
引言近年来,随着石化等基础工业的飞速发展,在生产过程中的易燃易爆和剧毒化学制品的使用急剧增长,由于设备和管理方面的原因,导致化学危险品和放射性物质泄漏、燃烧爆炸的事故增多。消防机器人作为特种消防设备可
关键字:
机器人 设计 灭火 简易 ATmega48 单片机 基于
引言 目前,机器人控制系统的研究重点在开放式、模块化控制系统等方面,机器人控制器的标准化和网络化已成为 ...
关键字:
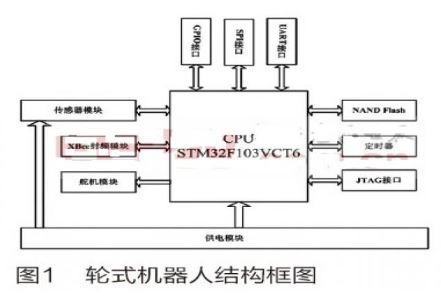
STM32 机器人 伺服控制器
1应用背景介绍在SMT工艺的后段制程后,当基板经过SMT贴片、回焊炉加温焊接后,仍有些零件还需要以人工插件后再...
关键字:
机器人 自动焊锡 SMT
一、直角坐标机器人介绍德国百格拉公司是世界上最著名的机器人供应商之一,生产多种规格的直线运...
关键字:
机器人 工件检测 检测速度
据国外媒体报道,《连线》杂志发表了纪念20世纪以来伟大发明的连载文章,从1900年开始,以十年为一期,涵盖科学、技术、体育、摄影、战争等方面,其中不乏推动人类进步的伟大发现和成就,包括爱因斯坦的相对论、巴拿马运河的峻工、交通红绿灯等。
以下为连载第三期:1921-1930年。
今天的连载把我们带回到1921到1930年代,这个时候两栖战争已经成型,Art Deco快速普及,贝比?鲁斯(Babe Ruth)成为偶像。
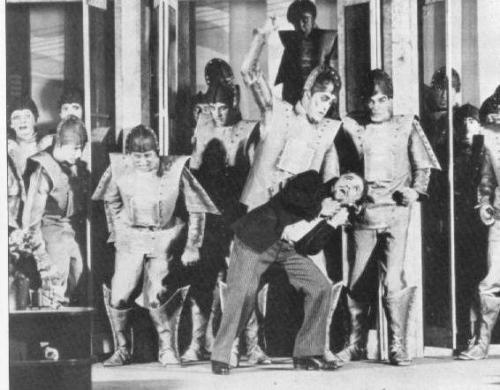
1920年:机器人兴起(娱乐)
1920年,一部名为《R.U.
关键字:
机器人 电路
据国外媒体报道,昨日微软前CEO比尔·盖茨(Bill Gates)参加了Reddit的“有问必答”(Ask Me Anything)栏目,并对未来科技领域的下一件大事进行预测,他的答案是——机器人。
问题:“在新兴技术日新月异的今天,你认为什么可以带来,像前几年家用电脑给消费者所带来的一样大的轰动效应?”
盖茨回答说:“机器人、无处不在的屏幕、语音交互,这些都将改变我们看待‘电脑&
关键字:
微软 机器人
能够观看的机器人
Svensk Industriautomation公司(SVIA)是一家位于瑞典Jönköping市的快速成长型自动化公司,已经为北欧国家、德国、英国、荷兰和美国等的客户开发机器人系统。系统组合成机器人单元,这些机器人单元能够与工厂的其它系统通讯。机器人单元的核心是SVIA公司的Pickvision视觉系统,能够确切检测传送带上的特定物体,并能准确拾取物体。简单地说,就是SVIA为机器人装上了眼睛。这种革新性技术已经在自动化市场颇为流行,因此过去几年SVIA
关键字:
SVIA 机器人
继鸿海喊出百万机器人大军之后,机器人产业渐渐成为产、官、学界的重要议题之一。今日(6日)经济部与台北市政府合作建置的「台北机器人馆」正式开幕,由经济部长施颜祥与台北市市长郝龙斌共同揭幕。针对台北机器人馆,施颜祥说明:「去年台湾机器人产值大约为500亿台币,相信随着机器人产业发展快速的脉动,预估到2016年将有机会突破1000亿元台币。面对日、德、美、韩对机器人产业的竞争,台湾一定要加把劲、持续努力!」
台北机器人馆结合国内产、学、研各界能量,致力推广智动化产业发展与机器人教育,将是一个常设型展馆
关键字:
机器人 自动化
机器人的时代即将到来,令许多人担心各行各业的工作岗位都将面临威 胁;但可靠的预测是,这个时代到来以后人们仍将有工作可做。但问题在于,对机器人和数字经济所创造的财富进行再分配不仅应该把重点放在增加就业岗位数量的 问题上,同时还应放在提高劳动者工资的问题上。以下是这篇文章的全文:
机器人来了!每一天我们似乎都会听到一则故事,抨击机器人和自动化不仅正在令那些身份低微的人失去工作,而且还对中产阶层的工作岗位造成了威胁——这些工作 能给人们带来足以缴纳养老金、医疗保险计划和住房抵押
关键字:
机器人 自动化
能跳到身体30倍高度的气动软体机器人
软软的,趴趴的。这样的“机器人”跟通常印象中金属制成的机器人刻板印象一对比,果然有不小落差。不过软趴趴也有软趴趴的作用,柔软的身体可以爬进细小的缝隙,用在地震救援之类的用途上简直是碉堡了。
哈弗某研究小组研究的这种软体机器人,通过背后的气体管道供应气体,以此来控制肢体屈伸,它可以爬进缝隙以及抓取物体。不过比较凶狠的是,最近他们让机器人学会了一种瞬间爆发,跳到身体30倍高度的技能。
说来好像很厉害的样子,其实原理非常简单:管
关键字:
电子 机器人
一直以来科学家都在尝试用机器人代替人完成各种任务,目前已有不少相关产品诞生,但可实现功能还偏简单,机器人特...
关键字:
传感器 机器人 人工智能
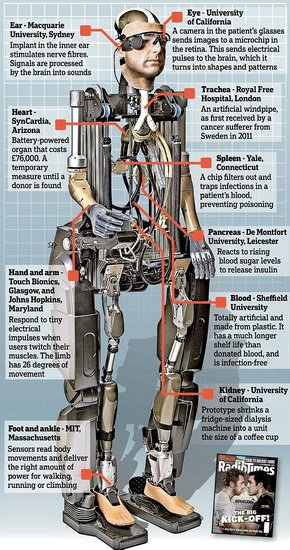
据英国每日邮报报道,目前,科学家花费100万美元打造一个真实的仿生机械人,它是由假肢和人造器官构成的。它被称为“雷克斯(Rex)”,是机械外骨骼仿生人的意思,身高可达到2米,是由从世界各地研制的人造肢体和器官构成。近年来,科学家在先进假肢和人造器官领域的突破性发展,意味着很快不仅能够置换失去的身体器官,还能进一步增强其功能性。
科学家建造的这个仿生机械人“雷克斯”,是由来自世界各地研制成功的人造肢体和器官构成
英国第4频道节目主持人贝
关键字:
仿生 机器人
想像一下如下情节:为了确定你是否患有卒中,你只能被带入医院进行检查。如今,一切都变了,一台5英尺高、可远程遥控的机器人,悄悄滑行到你的身边,在它的屏幕上出现了一张脸,那是你的神经学家,会诊就这样开始了。
听起来好像是天方夜潭,但世上首款医院用自动电视医疗机器人已经获得了美国FDA的510(k)批文。这些机器人正在投入使用。它的应用范围非常广泛,从中风诊断和特护病房预防到手术合作都将出现它们的身影。机器人的作用在于大力改善患者转归、减少医护成本,为患者提供他们能够承担的医疗服务。
位于加利弗
关键字:
InTouch 机器人 RP-VITA
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473