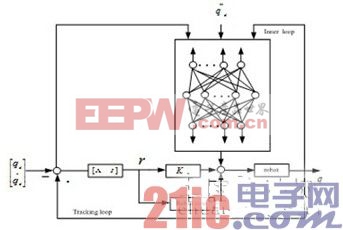
- 引言焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简
- 关键字:
学习 控制 方法研究 机器人 辨识 神经网络 模型 基于

- 1 引言非线性系统在现实世界中普遍存在,可以说绝大多数系统是非线性的,例如卫星的定位与姿态控制系统、机器人控制系统、精密数控机床控制系统等等,这些都不可能采用线性模型,因此研究非线性系统的最优控制问题有
- 关键字:
机器人 应用 连接 控制 线性 反馈
- 据科技媒体engadget报道,佐治亚理工学院的一项研究成果将大力推动机器人触觉,更安全的电子签名以及一般人机交互的发展。通过使用大量压电电子晶体管(称为“taxels”),中国科学院外籍院士、美国佐治亚理工学院王中林教授领导的三人研究小组找到了一个方法,可以把运动转换成电子信号。
换句话说,采用这项技术,未来机器人的手部可以分辨出物体表面的细微差别,或是像人类手指一样抓住某个物体,而人造皮肤可以像你手臂上的微小毛发那样感知触摸。
而且,这项技术也可以用在机器人触觉
- 关键字:
机器人 电子晶体管
- 据报道,机器人非常幸运,研究人员多年一直致力于研制新型机器人皮肤,使它们越来越像人类。目前,美国科学家们研制...
- 关键字:
机器人 机器触觉 传感器

- 机器人是机电一体化最高端的产物,也是多种高科技集成在一起的一种产品,用途非常的广泛。如今机器人发展的特点可概括为:横向上,应用面越来越宽,由95%的工业应用扩展到更多领域的非工业应用,像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷等等;纵向上,机器人的种类越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小。
- 关键字:
飞思卡尔 机器人 I.MX27
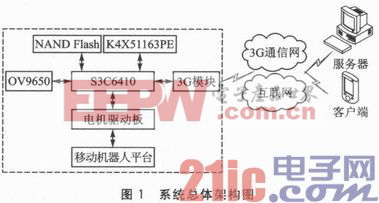
- 介绍了基于嵌入式Linux平台视频传输与控制系统的构建,给出了跨客户端通过3G网络进行远程视频传输的技术实现,并总结了在实现过程中遇到的难点以及对应的解决方案。
- 关键字:
机器人 3G Linux CGI Ajax
- 2013年4月21日,对于中国机器人的产业发展是具有里程碑意义的一天。在国家发展和改革委员会、工业和信息化部、科学技术部的指导下,在中国机械工业联合会的大力推动下,在国内外主流机器人企事业单位、大专院校、研究院所的积极参与下,由中国机械工业联合会牵头的“中国机器人产业联盟”将于4月21日在北京召开“中国机器人产业联盟成立大会”。
届时,政府相关领导、中机联会长、企业高层代表共150余人将集聚一堂,共同见证这一时刻的到来。会上,将会发布第一届联盟发起
- 关键字:
CIROS 机器人
- 说起医学突破,人们往往首先想到的是开发出了什么新药或者新的治疗方法;而谈及改变医疗体系,大家又会想到法律法规的修改。不过,这些想法都已经过时了,下一个冲击人类医学的将是获取、处理以及应用数据的方法。
推动这一轮变革的是大型科技公司、来自硅谷的创业者、著名的医疗机构以及学术界的人们。他们认为,通过一系列创新的软件和硬件的开发,现有的医疗体系会被彻底颠覆——保持健康将变得更加容易,而人生病时也能得到更好的治疗,整个社会经济也会因此发生巨大的改变。
未来,数据在医疗当中的
- 关键字:
机器人 医疗电子
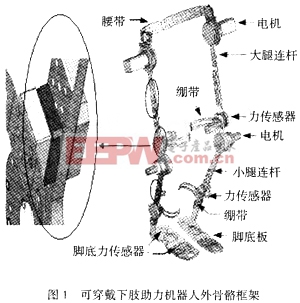
- 1 引言可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动
- 关键字:
系统 研究 感知 机器人 下肢 助力 穿戴
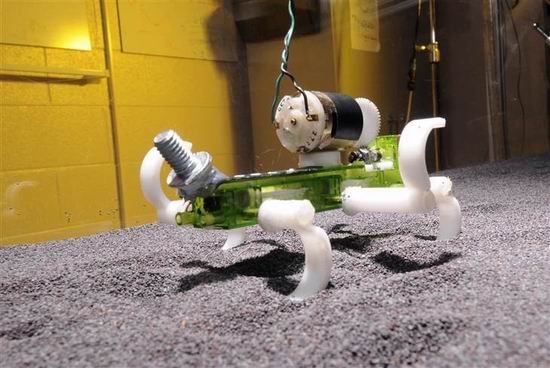
- 车轮非常适合在平坦道路上行进,但当地面上覆盖松散的沙子和较大的岩石时,机械装置则寸步难行。目前,科学家依据蜥蜴活动特征最新研制一款6腿机器人,该创新技术意味着未来我们可以派遣快速行进漫步车登陆火星表面进行勘测。
科学家最新设计一种蜥蜴机器人,可适用于沙质表面行进
美国乔治亚理工学院物理学家丹尼尔-古德曼称,像这款机器人的附肢非常适用于较少固体物质表面上行进。之前科学家曾设计具有鸟类特征的飞机和海豚特征的水下航行器,然而他们很少知道足部蹦跳和沙质微粒之间的互动作用
- 关键字:
机器人 自动化

- 对于所有使用远程操控机器手臂作业的人员来说,他们无法了解接触的物质是什么感觉。这事实上是一种通病,折磨着借助机械设备进行手工作业的每一个人。随着机器人变得越来越普遍,特别是在高风险状况下使用远程操作机器人让人们获益。现在研究人员希望减少那种认知负担,而且通过创造触觉系统使机器人更加有效。它被称作触觉技术,它代表了机器人技术中最具挑战性的研究之一。
机器人专家一致在持续追求能反馈触觉而且更容易被人们所操控的机器人设备。
震动是触觉反馈最常见的形式,将这一概念应用于
- 关键字:
机器手臂 机器人
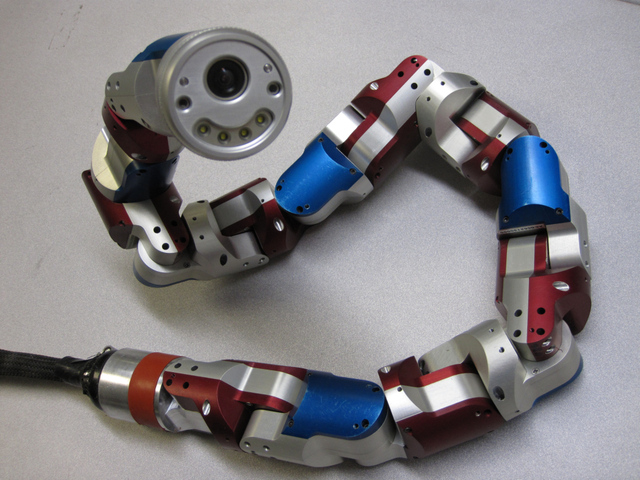
- 近日,卡耐基梅隆大学研究人员研发了一种可自动环抱柱子的机器蛇。据悉,研究人员耗费了几年时间才完成这一开发工作。而之所以会想到开发出这么一种设备则是为了能够在一些探测或者灾后搜索援救中发挥重要作用。
另外,研究人员还在这条“蛇”上加入了生活在大自然中的蛇所不具备的能力--可在环抱柱子的前提下继续前进。
- 关键字:
机器蛇 机器人
- 富士康抛出的“百万机器人”计划,让这一此前并不广为人知的传统劳动力替代者成为生产流程中的关键词。
但疑问和争议仍在持续,作为自动化技术的典型代表,此前多被用于制造业、国防等领域的“机器人”正向以富士康为代表的劳动密集型企业渗透,而这也无疑将对现有人工造成正面冲击。
事实上,除富士康以外,据本报记者了解,包括中兴、华为等公司也均在购买机器人,应用于流水线生产。
针对机器人与传统劳动力的成本比较,以及未来的市场空间,ABB(中国)有限公司副
- 关键字:
ABB 机器人
- 控制机器人系统的运动通常要求了解终端受动物体的方位(通常指工具提示或者受控参照系或者受控坐标系统)与物理...
- 关键字:
机器人 控制系统 运动学方程
- 摘 要:设计了一种自动巡线轮式行走机器人控制系统,采用AT89S52型单片机作为主控CPU,外加一个复杂可鳊程逻辑器 ...
- 关键字:
单片机 机器人 存储器
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473