- 东京,2008年9月29日 ——半导体行业全球领先公司之一意法半导体(纽约证券交易所代码:STM)和世界机器人前沿技术的领跑者早稻田大学仿人机器人研究院(HRI)宣布,双方合作开发出一款名为WV-1(早稻田双轮机器人1号)的高性能的双轮倒立摆机器人,这是目前正在进行的创新型仿人机器人和医疗护理机器人系统技术和解决方案研发合作项目的首项成果。
ST和HRI目前正在进行利用半导体前沿技术促进创新型仿人机器人和医疗护理机器人系统更快发展的合作项目。为推动相关技术和解决方案的开发
- 关键字:
半导体 意法半导体 机器人
- 摘要 嵌入式数据库一般不出现在表现层,所以很难被一般的用户所察觉。实际上,被称作“嵌入式数据库”的软件早在20年前就已经被组合在各种应用程序、软件组件和硬件环境中。它有两个很重要的特征——“嵌入性”和“实时性”。这里用实际应用的实例来说明,在嵌入式系统里如何有效地使用嵌入式数据库。
关键词 嵌入式数据库 工业控制 汽车导航 信息家电 宇宙航空&nbs
- 关键字:
嵌入式 数据库 工业控制 汽车导航 信息家电 宇宙航空 机器人 医疗信息系统 路由器

- 本课题研究的机器人工作在大约40 m深的浆液下,为了防止水煤浆由于长时间的存贮而沉淀,他能在按照预先规划的轨迹行走时完成搅拌功能。在这种条件下,一个很重要的问题就是机器人定位功能的实现,用来实时了解其具体位置。本机器人定位系统采用多路超声波传感器测距,然后采用三点定位法,把测距信息转化为机器人的位置信息。超声波作为一种无接触检测方式,与激光、红外以及无线电测距相比,在水煤浆中可以比较容易地穿透水煤浆达到测距的目的,且精度较高。
l 超声波测距系统
1.1 超声波测距原理
超声波测距原
- 关键字:
单片机 机器人 测距 超声波
- 一百多年以前,Nikola Tesla就曾设想要建造一个能够为全球提供无限能源的国际电网。但由于资金问题,这位塞尔维亚电学天才的研究工作未能持续到底,因此他的构想能不能够实现还是个未知数。
在一个世纪后的今天,英特尔(Intel)正在从事一项和Tesla构想极为相似的技术项目。在英特尔研发人员大会的最后一天里,英特尔首席技术官Justin Rattner介绍了公司这项无线能源项目,并在总结时用Tesla的照片结束了该演说。
不过,英特尔的这个项目并不完全和Tesla的设计相同。因为Tesl
- 关键字:
Intel 无线能源 发射器 Wi-Fi 机器人
- 新浪科技讯 8月22日消息,英特尔公司首席技术官贾斯汀(Justin Rattner)在英特尔秋季信息技术峰会上展望了令人振奋的计算未来,他认为,到2050年的时候,技术将使机器智能与人类智能更加接近。
贾斯汀在今天发表了主题演讲,他预测社交互动、机器人技术以及计算机感知真实世界的能力将实现巨大进步。贾斯汀表示,英特尔研究实验室已经开始关注人机界面,研究某些较预期更快到来的变化对未来计算性能的需求。
贾斯汀表示:“计算行业正以40年前人们难以想象的速度大步向前发展。有人认为我们
- 关键字:
英特尔 机器人 无线电源 WREL
- 仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时由于体积的限制使得各步行足相互间距较小,因此将造成机器蟹在行走过程中耦合较强,控制模型受躯体位姿、步行足位形和步态等因素的影响较大。这就要求控制系统控制结构灵活,具有调整步行足轨迹和步态的能力,并能适应控制模型的变化。因此必须研制一种具有强大运算处理能力、软硬件结构模块化的机器蟹控制系统。
从作业
- 关键字:
机器人 仿生 机器蟹 伺服控制器

- 对于一个欧洲产量最高的汽车制造商来说,生产线中各个环节的准确性和可靠性都是至关重要的。
Nissan所面临的问题是,现有的机械扶正器不能处理两个主要车辆的新玻璃型号。扶正器位于玻璃边线的6个点上,并且始终将其设于一个已知的“中央”位置,为下一道生产程序做准备。因此,重要的是,新视觉系统不仅能为两个新的型号提供准确信息,还可以很快适应未来生产的发展。
出于该方面考虑,Nissan基于多项重要原因与被选中提供系统的Capley Marker合作。他们预先为Nissan安
- 关键字:
康耐视 Nissan 机器人 视觉系统
- 0引 言
智能轮椅作为医疗护理领域的服务机器人,其应用大量使用了移动机器人技术。在智能轮椅的研究中涉及到的关键技术有导航系统、控制和能源系统、人机接口,但由于整个轮椅系统以人为中心,所以在研究中要解决的核心是轮椅的安全导航问题。所谓导航即是指移动机器人按照预先给定的任务命令,根据已知的地图信息作出全局路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地作出各种决策,并随时调整自身位姿,引导自身安全行驶到达目标位置。
本文对智能轮椅导航中的核心问题进行了分析,指出了现行研究中涉及的各
- 关键字:
机器人 智能轮椅 人机接口 导航 传感器
- 本文针对不同路面条件下移动机器人运动控制的实际问题提出了一种解决方法。该方法把模糊逻辑推理应用到移动机器人的行为控制中,并将地形坡度和地形类别作为控制器的输入,而机器人的速度作为控制系统的输出,从而实现了对移动机器人的行为控制。通过模糊逻辑控制器的仿真结果证明:该模糊控制算法在移动机器人运动控制中能表现出良好的鲁棒性和实时性。近年来,神经网络、模糊控制等理论的研究和应用有了很大的发展,进一步了解学习和应用这些理论将是下一步的目标。
- 关键字:
逻辑 系统 设计 模糊 控制 机器人 运动 移动
- 2008年7月14日-20日,由RoboCup国际联合会主办,苏州市人民政府和中国科学技术大学联合承办的“2008机器人世界杯赛”在苏州国际博览会举办,这将是RoboCup世界杯赛首次在中国举办,大约450支队伍2500多名参赛者及学者参加了比赛和学术研讨会。此次瑞萨以赞助者的身份加盟了此次盛会,为这些可爱的机器人提供“芯”动力。在RoboCup世界杯赛所有项目中,RoboCup足球世界杯赛观赏性极强,其特殊的魅力让机器人足球风靡全球。据悉,RoboCu
- 关键字:
瑞萨 机器人 MCU
- 摘 要:文章用反射镜面设计的理论知识和计算机仿真,为实现应用于中型组足球竞赛机器人全景视觉系统的反射镜面的快速有效的设计,自主开发了用于镜面轮廓设计的仿真设计系统,并设计制造了满足机器人任务要求的特殊曲线的反射镜面。通过实践表明基于知识和计算机仿真的现代设计方法大大提高了反射镜面设计的质量和效率,能从整体上把握设计的合理性,避免设计出错和产品返工,节省制造成本,并令设计结果满足预计的任务需求。
关键字:全景视觉、计算机仿真、镜面轮廓设计
引言
全景视觉系统是由一个朝上放置的摄像头和
- 关键字:
机器人 计算机仿真 镜面 视觉
- 一、概述
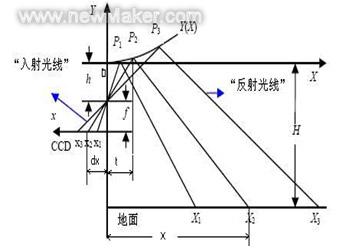
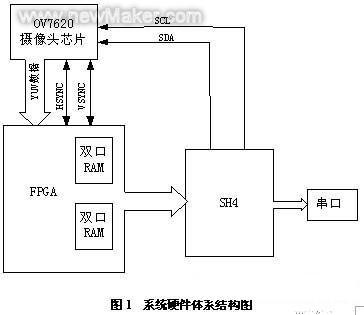
视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从事检验、目标跟踪、机器人导向等方面的工作,特别是在那些需要重复、迅速的从图象中获取精确信息的场合。尽管在目前硬件和软件技术条件下,机器视觉功能还处于初级水平,但其潜在的应用价值引起了世界各国的高度重视,发达国家如美国、日本、德国、法国等都投入了大量的人力物力进行研究,近年来已经在机器视觉的某些方面获得了突破性的进展,机器视觉在车辆安全技术、自动化技术等应用中也越来越显示出其重要价值。本文根据最新的CMOS图像采集芯片设
- 关键字:
机器人 机器视觉 CMOS 图像传感器 FPGA
- 机器人只有进入寻常百姓的日常生活,才能真正算得上是社会的主流。但目前的机器人还没有完全自我管理的能力,还不能取代人类在复杂的环境中完成复杂的任务,但从技术的角度来看,其智能化的进步是非常迅速的。
最近刚刚在台北举办过的“2008年台湾机器人展”被举办方描述为“小而美”,展出内容包括器械臂、服务型机器人以及机器人零组件和周边产品,参展商大多来自欧美、中国台湾和日本,参观者则来自世界各地,也包括来自中国大陆的不少观众。例如,日本THK公司展出的小型
- 关键字:
机器人 台北 智能化 工业领域 200806
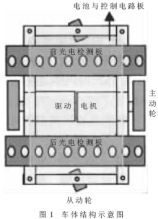
- 在最近的机器人比赛和电子设计竞赛中,较多参赛题目要求机器人沿场地内白色或黑色指引线行进。一些研究人员提出了基于寻线的机器人设计策略,主要是关注指引线的检测,但对于机器人的整体设计未做说明。本文在总结此类赛事的基础上,提出了一种将DSP(Digital Signal Processor)和CPLD(Complex Programmable Logic Device)作为核心处理器,采用模糊控制策略处理来自检测指引线传感器信号的机器人行走机构的通用性设计方法。
1 车体机械设计
由于机器人比赛
- 关键字:
DSP 模糊控制 机器人 传感器 单片机
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473