引言
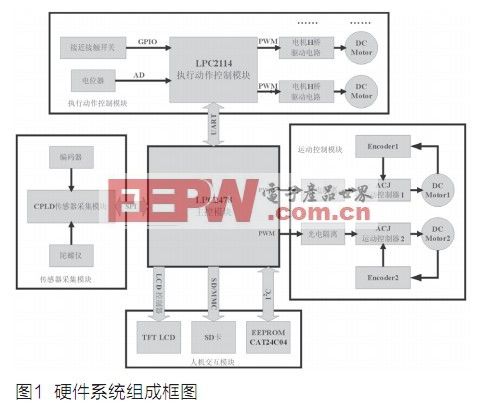
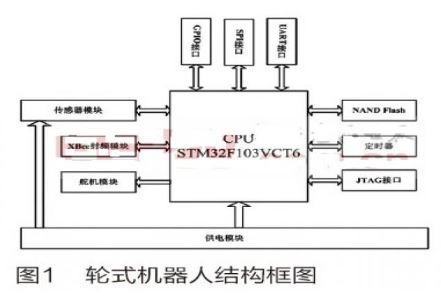
自主移动机器人是指具有行动决策和规划,以及自动执行能力,集人工智能、智能控制、信息处理、检测与转换等专业技术为一体的系统。一般移动机器人都是基于行为的,机器人只有到达指定位置才开始执行其他动作,因此导航和定位是移动机器人研究的重要问题。本文采用陀螺仪和光电编码器的惯性导航方式,并且采用LPC2478构建整个控制系统,并在一台机器人上得以实现。
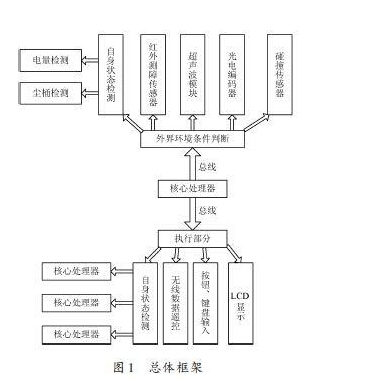
本设计的轮式自动机器人的控制系统主要分为主控模块、传感器采集模块、运动控制模块、执行动作控制模块和人机交互模块五个部分。传感器采集处理模块主要
关键字:
机器人 传感器 智能控制 LPC2478
目前,日本最新研制一款名 为“诺比(Noby)”的儿童机器人,这一名 称是“9月大小婴儿”的缩写。该机器人全身分 布着具有触觉能力的600个传感器、摄像头和 扩音器,它们装配在机器人头部实现视力和听力,这些装置与一台功能强大的计算机相连。这款机器人有助于揭示人类婴儿阶段的发育特征。
日本最新研制一款9个月婴儿机 器人——“诺比”,有助更好理解人类发育成长
诺比机器人身高71厘米(28英寸)、
关键字:
机器人 传感器
经过50多年的发展,人工智能已形成极广泛的研究领域,并且取得了许多令人瞩目的成就[1]。人工智能也称机器智能,是一门研究人类智能机理和如何用计算机模拟人类智能活动的学科。智能机器人技术综合了计算机、控制论、
关键字:
电路设计 实现 硬件 机器人 灭火 智能
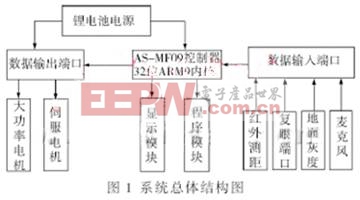
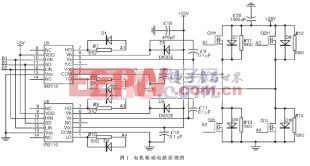
摘 要: 以Philips公司的ARM单片机LPC2119为控制核心,提出了一种自主式移动机器人的设计方案。应用98C1051构成多超声传感器子系统控制电路,由此子系统实现对障碍物的测距及机器人的自主避障行走控制;通过光敏传感
关键字:
机器人 设计 移动 自主 LPC2119 基于
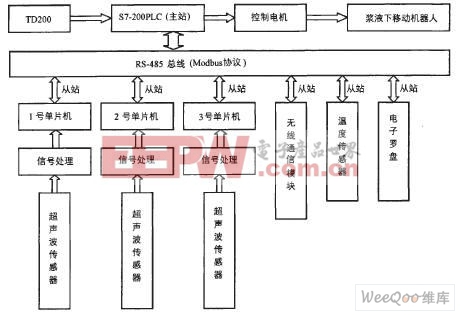
摘要:结合浆液下移动机器人系统的功能要求及PLC的特点,构建了桨液下移动机器人的控制系统。为提高该机器人系统的经济效益和实用性,简化机器人控制系统,以西门子PLC为主控制器构成整个机器人的控制网络。对网络
关键字:
控制系统 机器人 移动 浆液 PLC
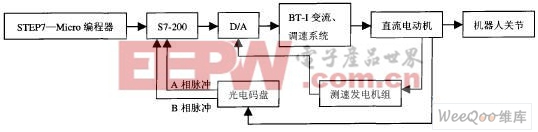
摘要:利用可编程控制器(PLC)控制系统的高可靠性、编程及维护方便、体积小的特点,将其应用于环流可逆调速系统中,研制出基于PLC的工业机器人关节直流伺服系统,通过环流可逆调速系统控制电机的正反转, 实现对工业
关键字:
直流 伺服系统 关节 机器人 工业 PLC
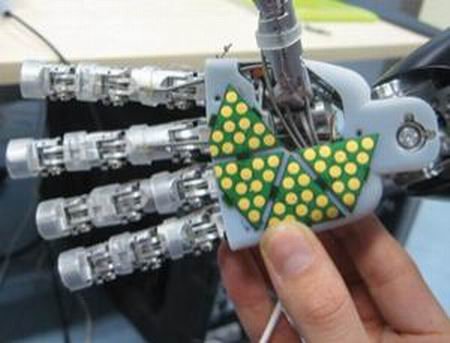
据英国《新科学家杂志》 报道,机器人装配皮肤不仅可以使它们更具审美感,同时也更让社会公众所接纳。触摸感应式皮肤还可以 避免机器人出现意外伤害。目前,意大利科学家最新研制一种机器人皮肤,可灵敏地感应到1克重物体的压力。这种最新机器人皮肤是由三角状柔性印刷电路板构成,它的作用相当于传感器,能够覆盖在iCub机器人表面。每个三角状柔性印刷电路板的边长 各3厘米,并包含12个电容铜触点。
iCub今年5月份,意大利科技协会一支研究小组将在iCub机器人上首次装配触摸式皮肤,据悉,这种新型 机器人皮肤
关键字:
机器人 传感器
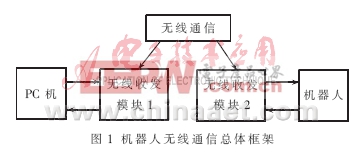
由于移动机器人左右两轮的非线性特征,其反馈调节无法克服这一特性,必须借助PC机来进行调节。为此提出了一种无线实时反馈控制方法,在PC机上加入PID控制算法,实现了对机器人的无线实时反馈控制。
关键字:
控制系统 设计 反馈 实时 机器人 无线 移动 通信协议
最近在看一部很有意思的科幻影集–Caprica,它是知名影集Battlestart Galactica的前传,描述的是人类与机器人的战争故事。Caprica这部前传,则是回过头来说机器人自主性智能的由来,而这个蕴孕机器人智能的Caprica星球,很显然地即是地球未来生活的写照
关键字:
机器人 3DTV
目录1.使用LEGOMINDSTORMSNXT进行原型开发2.使用iRobotCreate进行原型开发3.使用NISingle-BoardR...
关键字:
NI LabVIEW 原型开发 机器人
记者从广东省工业机器人高峰论坛上获悉,随着改革开放30年,广东GDP上升、劳动力最低工资上升、高素质劳动力紧缺等因素,我国必须使用机器人来提高制造业产业附加值、提高产品品质和保证质量统一。工业机器人及数字化装备发展面临着前所未有的好时机。
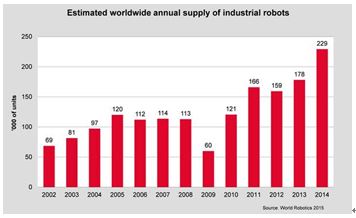
机器人是先进制造技术和自动化装备的典型代表,是人造机器的“终极”形式。机器人已经成为衡量一个国家制造水平和科技水平的重要标志。据联合国欧洲经济委员会报告,2008年全球工业机器人装机总量已经超过100万套。其中亚洲增长最快。预计到201
关键字:
机器人 自动化
使用iPAM系统的病人接受上肢治疗运动挑战:开发一种安全且可靠的机器人康复系统,对中风后手臂残障...
关键字:
LabVIEW 机器人 康复系统
使用NI LabVIEW软件最大的好处是可以设计且自定义图形化用户界面.
作者:
Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab
行业:
Manufacturing, 电子
产品:
LabVIEW, 机器视觉附件
挑战:
用短批次和多样化的产品为装配电子元件设计一个紧密集成有机器人技术和视觉技术的系统
解决方案:
在NI视觉系统的指导下,用
关键字:
NI LabVIEW 机器人
使用iPAM系统的病人接受上肢治疗运动
作者:
Andrew Jackson - University of Leeds
Peter Culmer - University of Leeds
Martin Levesley - University of Leeds
Sophie Makower - Leeds Primary Care NHS Trust
Bipinchandra Bhakta - Leeds Institute of Molecular Medi
关键字:
NI LabVIEW 机器人
概览
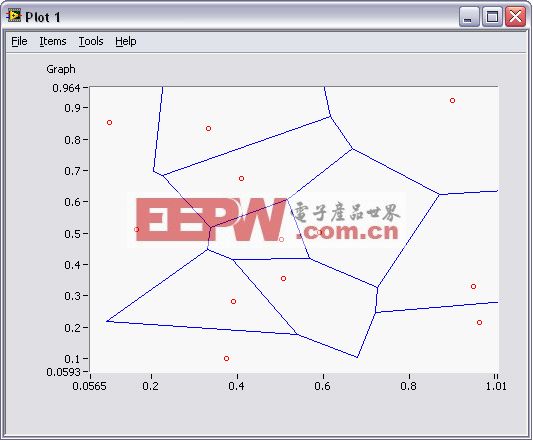
自主移动机器人的规划与导航包括利用有目的的抉择制定和执行来使系统实现最高级的目标。机器人是否胜任导航的能力必须通过两个技能来证明:路径规划和避障。
目录
1. 路径规划
2. 避障
3. 在中LabVIEW使用算法
路径规划
给定地图和目的地情况下的路径规划指的是机器人通过轨迹识别行进至目的地的能力。路径规划是至关重要的问题解决能力,因为机器人必须有能力决定在到达目的地前的路程中如何行进。
路径规划可分为两部分:表达与算法。路径规划人员首先将机器人
关键字:
NI LabVIEW 机器人
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473