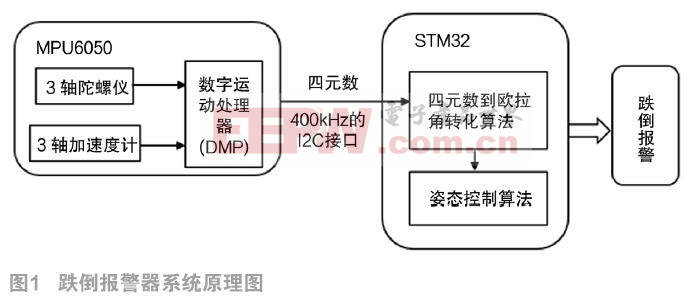
- 鉴于现阶段老人跌倒报警器在携带等方面存在的问题,提出了一种利用陀螺仪、加速度计以及磁力计等惯性传感元件设计的跌倒报警器,文章分别从原理、结构组成与软件设计三个方面对跌倒报警器的研究过程展开详细论述,最后通过实验测试,验证了所设计的跌倒报警器在实际应用中能够对跌倒进行准确的判断。
- 关键字:
惯性传感技术 跌倒检测 姿态解算 卡尔曼滤波器 201803
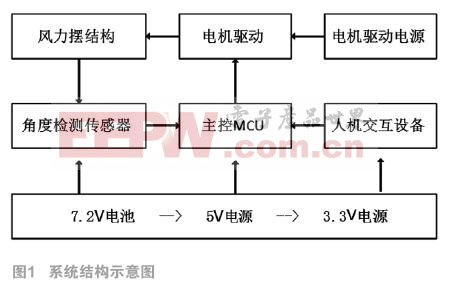
- 本文主要讲述利用Coretx-M4单片机控制风力摆运动轨迹的实现方法。系统根据当前加速度、角速度及图像信息,利用闭环控制算法调节电机,实现风力摆直线摆动、圆周摆动及定点静止等功能。系统响应速度快,控制精度高,交互操作界面简单易用,具有良好的交互性。
- 关键字:
风力摆 K60单片机 姿态解算 PID控制 201704
- 摘要:针对现有小型无人机导航系统的解算速度慢、多处理器核心臃肿可靠性差的缺点,实现了一种仅使用单一FPGA作为数据处理核心的小型高速导航解算系统。该系统对飞机运动方程组和导航方程组进行并行化分解,对相互独
- 关键字:
并行计算 FPGA 姿态解算 导航解算
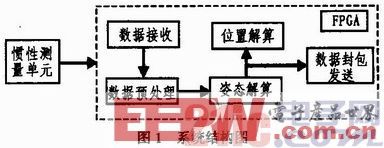
- 摘要:针对现有小型无人机导航系统的解算速度慢、多处理器核心臃肿可靠性差的缺点,实现了一种仅使用单一FPGA作为数据处理核心的小型高速导航解算系统。该系统对飞机运动方程组和导航方程组进行并行化分解,对相互独立的中间变量进行并行计算,使得单个运算周期能够同时进行6次浮点运算,在不盲目增加硬件消耗的条件下有效提高了解算速度。仿真和实验结果表明系统能够高效地进行导航信息解算,在小型无人机的导航控制领域有重要的工程应用价值。
导航解算是小型无人机导航控制的基础,小型无人机机动性强,为了完成自主导航任务,必
- 关键字:
FPGA 姿态解算 导航解算
姿态解算介绍
您好,目前还没有人创建词条姿态解算!
欢迎您创建该词条,阐述对姿态解算的理解,并与今后在此搜索姿态解算的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473