基于电磁场检测的寻线智能车设计
——
本设计中顺着电流方向竖直放置线圈,这是由于对于放置在导线上方h处的,与导线水平距离为x的线圈(如图4示)中产生的感应电动势大小与![]() 成正比,其中q是传感器所在平面与导线的夹角。由于车身可能会与导线成一定的夹角,因此q不一定为0。
成正比,其中q是传感器所在平面与导线的夹角。由于车身可能会与导线成一定的夹角,因此q不一定为0。
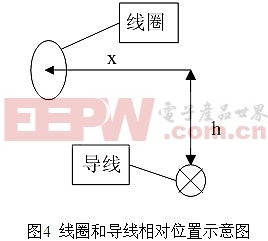
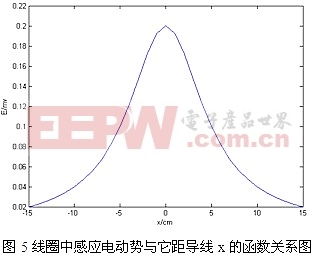
图5是按照q=0o,h=5cm时画出的线圈中感应电动势与导线的水平距离x 的关系,可以看出竖直放置的线圈中的感应电动势分布简单,衰减快,远处对近处的干扰小,非常适合作为检测小车当前位置的传感器。
对于直导线,当装有小车的中轴线对称的两个线圈的小车沿其直线行驶,即两个线圈的位置关于导线对称时,则两个线圈中感应出来的电动势大小应相同、且方向亦相同。若小车偏离直导线,即两个线圈关于导线不对称时,则通过两个线圈的磁通量是不一样的。这时,距离导线较近的线圈中感应出的电动势应大于距离导线较远的那个线圈中的。根据这两个不对称的信号的差值,即可调整小车的方向,引导其沿直线行驶。
对于弧形导线,即路径的转弯处,由于弧线两侧的磁力线密度不同,则当载有线圈的小车行驶至此处时,两边的线圈感应出的电动势是不同的。具体的就是,弧线内侧线圈的感应电动势大于弧线外侧线圈的,据此信号可以引导小车拐弯。
另外,当小车驶离导线偏远致使两个线圈处于导线的一侧时,两个线圈中感应电动势也是不平衡的。距离导线较近的线圈中感应出的电动势大于距离导线较远的线圈。由此,可以引导小车重新回到导线上。
由于磁感线的闭合性和方向性,通过两线圈的磁通量的变化方向具有一致性,即产生的感应电动势方向相同,所以由以上分析,比较两个线圈中产生的感应电动势大小即可判断小车相对于导线的位置,进而做出调整,引导小车大致循线行驶。











评论