智能车赛道记忆算法的研究
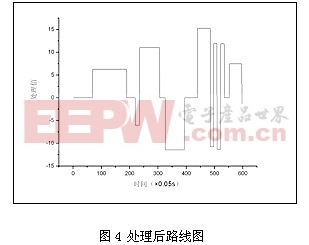
虽然我们已经能够方便地从初圈记录下的曲线图中判断出赛道的特征,但是我们还需让单片机能自动识别出这些信息,并过滤掉一些毛刺和波动。经过反复的研究,我们已成功地找到了合适的处理方法,并将图2的曲线图处理为图4所示的路线图。在处理后的路线图中,处理值为0时表示此时车处于直道上;当处理值大于0时表示车处于向左转的弯道上,曲率半径与处理值成正比关系;反之亦然。这样,第二圈就可根据此信息进行相应的最优决策。
本文引用地址:http://www.eepw.com.cn/article/95570.htm
第二圈策略
对于使用赛道记忆算法的智能车来说,第二圈才是最关键和最吸引人的部分。在第二圈,如何充分利用根据第一圈收集的赛道信息,跑出最优的成绩,这个是仁者见仁的事情,这里只从车速策略、转角策略以及其他策略三部分简单地介绍一些思路,希望能起到抛砖引玉的作用。
车速策略
由于车本身的某些局限性,如舵机响应时间、赛道摩擦系数、轮胎抓地力、传感器布局等因素的影响,对于某种特定弯道,车是有它所谓的极限速度存在。如果我们利用初圈得到弯道的曲率半径后,在过各弯道时将车速调至它相应的极限速度,那么理论上这就是它所能跑出的最优成绩了。
对于直道,特别是长直道,更能发挥赛道记忆算法的优势。例如,在初圈记忆后得到某段直道为2800个脉冲点长,那么在决策中就可在前2500个脉冲时启动电机用最大占空比加速,超过2500脉冲时直接减速,将速度调在下一个弯道的极限速度进行过弯。由于事先已经知道直道的长度,因此调速策略更能有的放矢。
转角策略
如果赛车采用的是一字型传感器布局的话,当你将中心点设偏的话,那么赛车也会出现一定的左右倾向性,从而给在弯道时“抄近路”奠定了基础。在初圈记忆后,赛车跑第二圈时可以直接得出下个弯道是左拐还是右拐。这样赛车就可以按比规定更小的曲率半径通过赛道,从而减少了经过路径,也节约了时间。同样,一般赛车在直道上高速行驶时经常会出现来回振荡的现象。如果经过初圈记忆,赛车判断自己正处于直道时,可以进行相应的措施,很好地解决这个问题。
问题和展望
虽然赛道记忆算法可以大大提高赛车的成绩,但目前来讲,在实际使用过程中想取得好的成绩,还需要做更深入的研究工作。原因主要有以下两点:
第一,目前大学生智能车比赛的赛道有着越来越复杂、越来越长的趋势,十字交叉线也将不只出现一个,这对于初圈的记忆和数据处理都产生了很大的挑战。
第二,由于决赛之前赛道是不公布的,因此赛道记忆算法存在很大的风险,较保守和安全的算法在决赛中可能更有利。
虽然赛道记忆算法存在一定的风险,但是它独特的思路却是值得继续发展下去的,有着很大的发展潜力。我们预测,在将来的比赛中,这种处理方式将得到广泛地应用,第一圈和第二圈将被区分开来,第二圈将在第一圈的基础上有所提高,而不是简单的重复。




















评论