韩国智能模型车技术方案分析
考虑到智能车在直线加速区间的末端可能会遇到突然出现的拐弯区间,部分模型车设计了专门的制动部。值得注意的是MC33886具有制动的功能,在行驶过程中可以通过单片机的控制使直流电机紧急制动。但是在韩国智能车的设计中没有见到类似的应用。
本文引用地址:http://www.eepw.com.cn/article/95566.htm智能车控制方案及软件流程
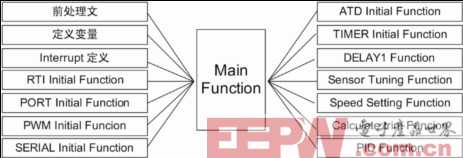
单片机系统需要接收路径识别电路的信号、车速传感器的信号,采用某种路径搜索算法进行寻线判断,进而控制转向伺服电机和直流驱动电机的工作。单片机的控制功能框图见图8。
韩国智能车控制策略可以分为速度优先型和稳定优先型两种,即有的控制目标锁定在尽可能快地行驶上,有的重点放在智能车行驶的稳定性上。
总之,设计目标不同,接下来的控制方法也就随之不同,从而产生了各种各样的设计方案。
智能模型车的路径搜索算法(Line Searching Algorithm)是智能车设计的关键部分,智能车设计的大部分工作都是围绕它来展开的。
下面介绍三种不同的路径搜索方法。
1、利用8对传感器进行道路识别,每个传感器间隔2厘米,成直线排列。传感器对白色的反射率设为最大,对黑色的反射率设为最小。把最大、最小值之间分为四个index(0,1,2,3)区间,通过对各个传感器index值的组合基本能够确定智能车的位置。但划分成4个区间不足以精确控制方向,因此,又把每一个区间划分成12个二重区间,即每一个传感器index区间增加到48个。此时对位置和行驶方向都能较精确的控制。
但这种方法对识别道路的计算量大,计算时间较长。
2、使用4对传感器,分别安装在智能车前部的左右两侧,4对传感器之间的间隔分别是4厘米、8厘米、4厘米。先使用内侧的两对传感器来识别路径,再使用外侧的两对传感器进行二次识别。当黑色路线在四个传感器的正中间位置时ADC值最小,而有偏离时ADC值就会变大。利用此原理得到路线相对位置偏差。传感器工作情况如图9所示。

伺服电机相关文章:伺服电机工作原理












评论