新型AC伺服电机/驱动器(08-100)
因AC伺服电机可为多轴运行,因此要求驱动器更小,从而使控制柜设置面积得到大幅削减。如今超小型的AC伺服电机/驱动器更加小巧了,与同类产品相比设置面积削减了52%,可以为控制柜的节省空间进一步作出贡献。而它和小型PLC配合,也希望驱动器能更小。尤其AC伺服电机/驱动器的高度仅为120mm,可以与小型PLC安装在相同的管道间,这样可以使管道间距窄小化,从而实现控制柜的空间大大节省。
本文引用地址:http://www.eepw.com.cn/article/91911.htm通过实时自动调谐来设定最佳增益。即承载了实时自动调谐功能,从而可实时推算设备的负载惯量,并根据其结果来自动设定最佳增益,从而使调整变得更简单,见图2所示。
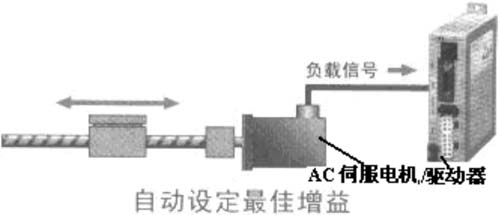
图2 通过实时自动调谐来设定最佳增益,从而使调整变得更简单
符合国际工业标准(如DIN型)导轨的一触式安装,使用DIN导轨安装单元,可实现(如DIN型)导轨一触式安装。这样可以提高组装作业的一致性,使维护时的更换也变得更容易。
参数单元(例如上载和下载)很方便的通过拷贝工具来实现,而参数单元又使多个伺服驱动器的参数设定变得更简单,从而在批量生产时的参数设定也更简单了。
可以高速定位/移动。其指令脉冲频率可以达到500kpps,是同类以往产品的2倍,因此可以在高速下进行高精度控制, 达到了缩短了间歇时间之目的;通过控制器能接收来自驱动器的反馈脉冲,并能在上位确认当前位置,这样达到了通过反馈脉冲监视装置定位有无异常之目的,如图3所示。
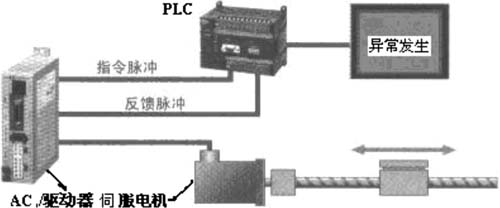
图3 为高速下进行高精度控制示意图
可以使用转矩限制功能。它有保持2种转矩(见图4中A和B)限制值的功能,在挤压成型、部件插入等应用中,可以切换转矩使用,达到了希望能改变推动力使用之目的(见图4)。
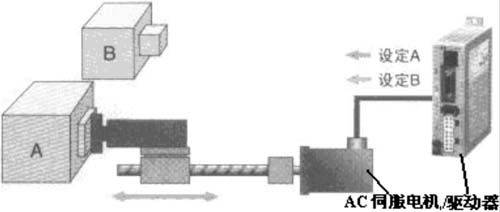
图4 切换转矩使用示意图
通过适应滤波器来降低机械振动。它能自动检测振动频率,消除振动,即使共振频率发生变化也能实时自动追踪,可以降低传送带等刚性较低的机械振动,达到了希望能降低机械振动之目的.
它能对各种各样的应用来切换指令控制模式,就是说它可以在位置控制、速度控制、转矩控制模式间切换使用。尤为突出的是在压机、张力、挤出等应用中有出色表现。
驱动器种类
驱动器由通用输入型,脉冲串输入型。其功能如下:
电源规格分为ACl00V、AC200V。而电机容量又分单相、单相/三相与三相。而接口指令形态分为脉冲串、模拟量及高速伺服通信的运动网络。其控制模式分位置控制,速度控制及转矩控制.而控制模式切换又分为模式切换。其调谐功能又有陷波控制、自动调谐与实时自动调谐等三种。而驱动器功能可实现转矩限制、编码器输出内部设定速度。
其脉冲串是一种针对伺服而言,是将速度及移动量通过脉冲串输入的一种方式,而转矩控制是调节旋转力的控制,在零件压入、成型、螺丝紧固等用途上非常有效;而最佳增益功能,由于位置控制时的实时自动调谐设定是自动设定的,因此在一定模式的动作反复输入后,可以自动实现适当的刚性设定。
模拟量是一种针对伺服,将速度及移动量以模拟量来输入的方式;而指令控制模式切换,可以在位置、速度、转矩控制中,选择2种控制模式切换使用;其绝对值输出是指控制器通电后,控制器读取驱动时绝对位置的数据,以实现恢复到绝对位置。
陷波控制功能可根据振动频率自动设定滤波器来抑制振动。当INC增量型输出时,从控制器接通,电源一直保持原点位置开始的方式。
位置控制是指移动到目标位置,移动完成后使其停留在目标位置的一种控制方式;而自动调谐是指电机根据驱动器自动生成的指令模式运行,并根据当时所需的转矩推选出负载惯量,自动设定恰当的增益。
适应滤波器可实时自动调谐,实时推算机器的负载惯量,并根据其结果自动设定最佳增益.而速度控制是改变速度、转数的一种控制方式,在诸如打磨石旋转、溶接速度、传送速度等用途上非常有效;其转矩限制功能可通过限制电机输出转矩的功能,该功能可以在第1转矩限制/第2转矩限制间切换使用。

伺服电机相关文章:伺服电机工作原理












评论