基于计算机仿真的全景视觉镜面设计
2 实验与结果
本文引用地址:http://www.eepw.com.cn/article/85679.htm1) 当机器人在场地中间位置时,需要看到球门,以便区分己方球门和对方球门,确定运动的方向。
2) 看到的远处的球要具有较准确的方向信息。
3) 看到的近处的球要具有较准确的方向和距离信息,即要求近处的观察分辨率需要达到一定的要求。
4) 尽可能少地看到机器人本身(无用信息),以便更多地获取机器人四周的环境信息。
根据以上要求,可将镜面分成两部分设计,一部分用来观察机器人1m内的范围,一部分观察1米外和球门的信息。实现过程如下:
事先根据需要考虑整个图像的观察区域分布,分配不同距离区间的分辨率,然后运行仿真程序得到镜面曲线和成像效果(见图3),并且把镜面曲线的各点坐标保存成数据文件,方便后期的数控车床加工提取数据。实际镜面成像效果图如图4所示。
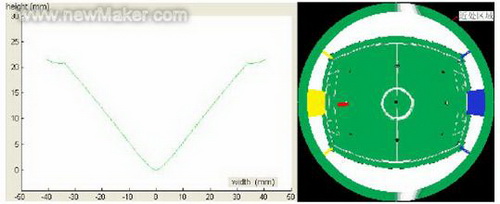
图3 镜面剖面图和成像效果图

图4 加工完成的反射镜面及实际镜面成像图
3 总结
通过虚拟仿真的计算机辅助设计方法以及镜面逆推算法,可以方便而有效地设计出全景视觉系统的反射镜面,满足了预先设想的任务要求,在足球机器人应用良好。借助计算机辅助设计及仿真方法,产品设计不仅提高了效率,更提高了设计的质量,并且能把设计集中在创新上而不是一些繁琐的计算和参数细化上。
参考文献:
[1] Simon Baker and Shree K. Nayar, A Theory of Catadioptric Image Formation[C], Computer Vision, 1998 Sixth International Conference, Published in Jan. 1998 on Page 35-48.
[2] José Gaspar, Claudia Décor, Jun Okamoto Jr etc., Constant Resolution Omnidirectional Cameras[C], In Proceedings of the Third Workshop on Omnidirectional Vision (OMNIVIS.02) IEEE, 2002.
[3] Fabio M. Marchese, and Domenico. G. Sorrenti, Mirror Design of a Prescribed Accuracy Omni-directional Vision System[C], In Proceedings of the Third Workshop on Omnidirectional Vision (OMNIVIS.02) IEEE, 2002.
[4] 许成珅,蒋平. 基于全维视觉的足球比赛机器人目标定位[J].微计算机信息,2005,8-3:85-87。
创新观点:
开发了镜面设计仿真系统,可以设计任意需求的镜面轮廓(包括传统的一定曲面方程的镜面和按需输入区间成像分辨率的镜面),并且根据该仿真系统设计制造了一个符合特殊任务需求的特殊曲线镜面(不同于其他现有曲面)。
作者简介:
庄惠敏(1981),女,籍贯福建省,上海交通大学机械电子系机器人所研究生,研究生,主要研究方向为智能机器人全景视觉导航。
曹其新(1960),男,籍贯浙江省温州,教授,博士生导师,主要研究领域:机器人视觉,基于网络的机器人智能控制。 (end)







评论