利用双电机控制技术简化高能效电器设计
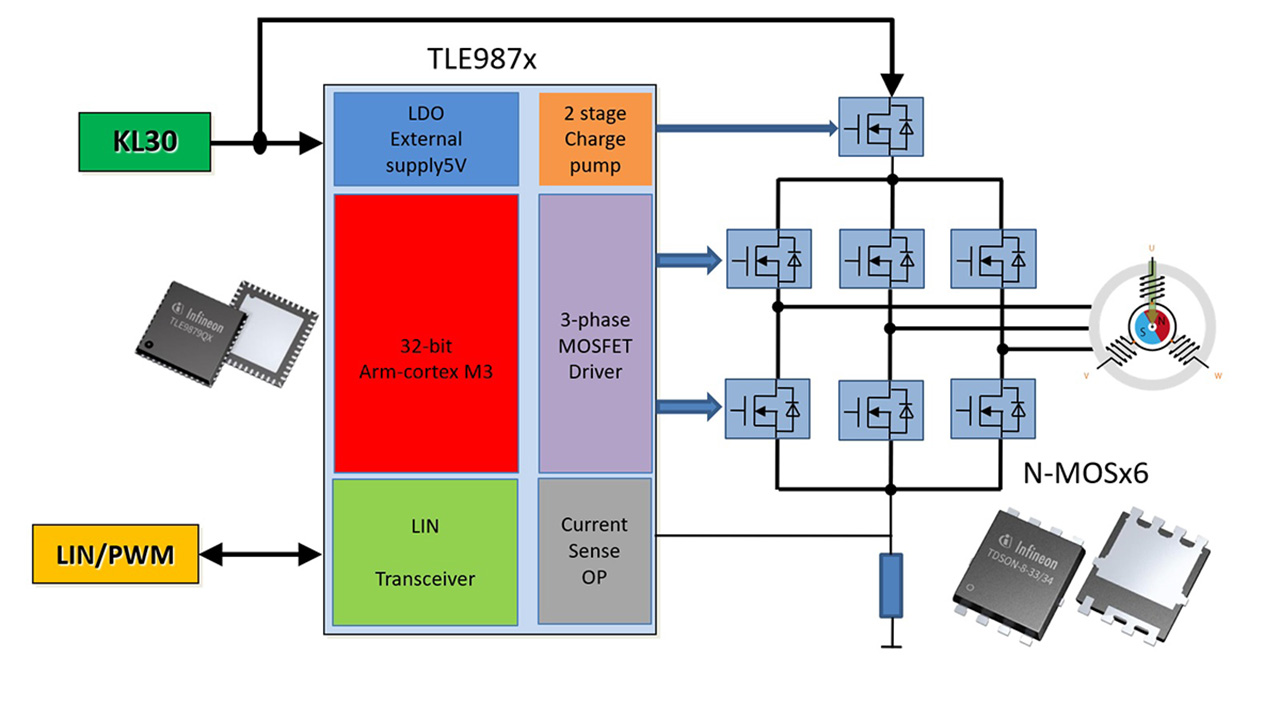
转子角度估算器和电流控制环路大约要消耗1,400个系统时钟周期,相当于128MHz最大系统时钟频率下的11μs时间。这样,在相当于20kHz开关频率的50μs PWM周期下,可以同时实现对两个电机的控制。当然,为控制两个电机,芯片需要两套空间矢量PWM调制器和用于电流采样的额外模拟输入端。图2是一个双电机控制IC的结构图,它包含嵌入式运动控制引擎和用于执行应用层代码的8位微控制器内核。这种方法的优势是它能将在微控制器上执行的慢速系统级功能与MCE执行的高速电机控制算法分隔开来。
本文引用地址:http://www.eepw.com.cn/article/84169.htm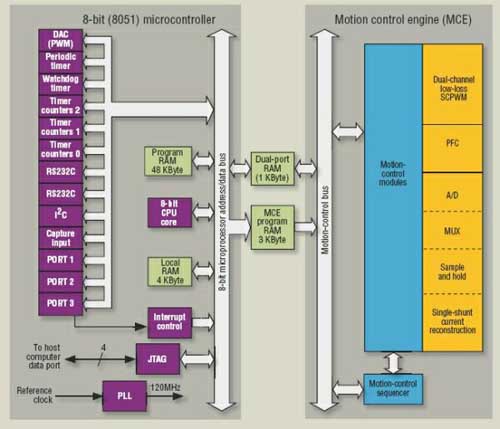
图2:包含用来执行应用层任务的8位微控制器的双电机控制芯片。
MCE库函数
高速执行控制算法的关键是MCE库函数在ASIC中的实现效率。两个重要的反馈控制单元(PI控制补偿器和矢量旋转块)可以作为库函数的典型例子。ASIC实现需要优化硅片和时钟周期的使用,并同时不牺牲鲁棒性和可靠性。
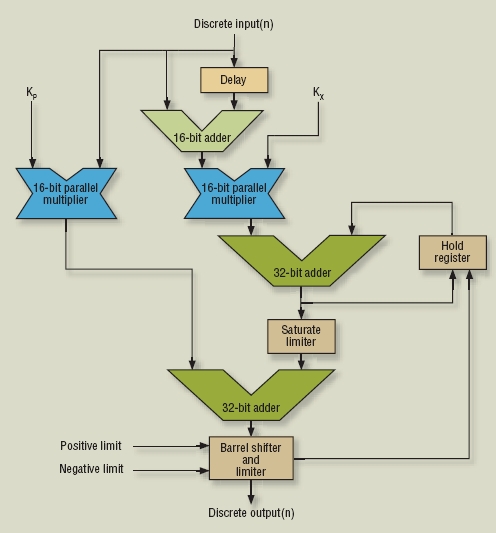
图3:比例积分(PI)控制补偿器可高效地使用MCE硬件资源和时钟周期。
众所周知的PI控制补偿器的ASIC实现(图3)基于连续时域转移函数:
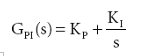
将这个表达式转换到离散时间域就可以产生一组定义ASIC实现的微分方程:
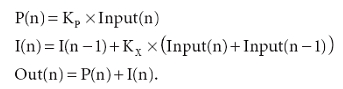
为保持低输入电平时的精度,并将输出重新调节到16位变量,积分项的总和具有32位分辨率。抗饱和模块可以在输出达到系统的物理极限时,防止积分项饱和。
矢量旋转模块是一个二维矩阵函数,用来实现旋转和固定参考系之间的电压转换。前向旋转具有正弦和余弦项:
有多种三角恒等式可以将正弦和余弦项的运算简化为0到90?范围的正弦函数运算,但根据可用硬件的不同,该项的运算会有所变化。在一些微控制器实现中,快速乘法函数的缺乏将迫使软件开发人员依赖简单的查找表。在具有单周期乘法指令的DSP或RISC处理器中,可用泰勒展开式计算正弦函数。
针对基于一系列加法、减法和移位函数,仅在13个周期内就可实现12位精度的ASIC实现,开发被称为CORDIC算法的矢量旋转函数(图4)。这种运算要比在32位RISC处理器上使用泰勒展开式进行运算快10倍。
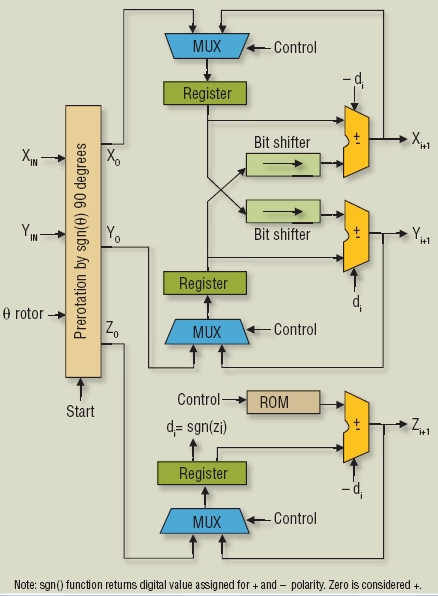
图4:CORDIC算法计算矢量旋转的速度比使用泰勒展开式的方法快一个数量级。
简化电机控制
尽管可能存在许多种配置,但图5所示的采用单个控制IC操作双电机平台的配置是最高效的。这种配置不仅能消除用来控制第二个电机的第二个IC(该IC导致了不必要的冗余设计),还使得两个电机的复杂接口设计成为可能。例如,当一个电机发生故障(比如短路或闭锁),第二个电机可以立即像反射动作一样被去激励,从而减少与主控制系统通讯相关的延迟。以空调应用为例,压缩机电机的速度和蒸发器风扇要求相互跟踪以优化工作效率,控制系统通过直接写入MCE寄存器设置电机速度,并避免多个IC之间的复杂通讯。
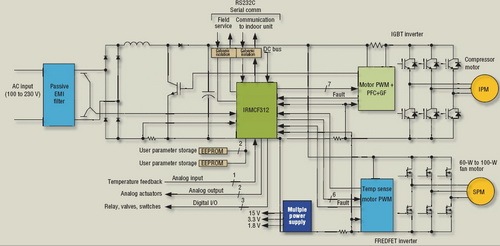
图5:通过单个平台提供的双电机控制可以消除冗余硬件和对两个分离控制器之间的复杂通讯链路的需求,并能实现两个电机之间的复杂接口。





评论