基于MCP2515的多路CAN总线接口及驱动程序设计
3 驱动程序设计
本文引用地址:http://www.eepw.com.cn/article/82980.htm驱动程序是应用程序与硬件之间的中间软件层,它完全隐蔽了设备工作的细节。Linux操作系统根据设备中信息传送方式的不同,将设备分成3种类型:字符设备、块设备和网络设备。9200与MCP2515的通信都是通过SPI接口以字节为单位进行的,因此MCP2515属于字符设备。由于5个MCP2515共享9200的一个SPI接口,因此采用一个驱动程序来管理所有的MCP2515,这样做有利于对所有设备进行统一管理。
3.1 驱动程序中定义的主要数据结构
CAN总线通信是基于报文帧的,在驱动程序中,无论发送数据还是接收数据都是基于报文帧的操作,因此需要设计合适的数据结构以满足数据操作的需要。
3.1.1 接收与发送CAN报文帧结构体
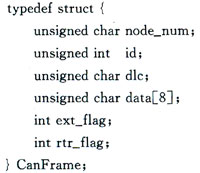
其中,node_num为MCP2515的节点号(0~4),id为CAN报文帧的标识符,dlc为数据长度(0~8),data为CAN报文帧的数据缓冲区,ext_flag用于标识CAN报文帧是否为扩展帧,rtr_flag用于标识CAN报文帧是否为远程帧。
3.1.2 设备配置结构体
(1)波特率和报文滤波配置结构体
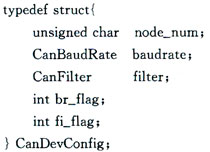
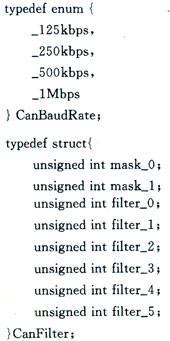
其中,node_num为MCP2515的节点号(0~4),baudrate为CAN总线通信速率,filter为报文滤波配置结构,br_flag用于标识波特率配置是否有效,fi_flag用于标识报文滤波配置是否有效。baudrate和filter的数据结构类型定义如下:
(2)工作模式配置结构体
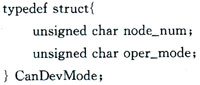
其中,node_num意义同上,oper_mode表示该节点的工作模式。MCP2515共有5种工作模式,分别是配置模式、休眠模式、仅监听模式、回环模式和正常模式。一般设备都工作在正常模式。
3.1.3 环形数据接收缓冲区结构体

其中,can_recv_buf为接收CAN报文帧环形数据缓冲区,recv_pos和read_pos分别表示数据存入和读出缓冲区的位置;wq定义的是一个等待队列,用于实现阻塞型read操作。
3.2 驱动程序接口
驱动程序的接口主要分为3个部分:初始化与退出函数接口,完成设备安装和卸载等操作;文件系统接口,由file_operations数据结构来完成;与设备的接口,完成对设备的读/写等操作。
3.2.1 初始化与退出函数
在安装驱动程序时,操作系统会调用初始化函数进行设备注册、设备初始化以及安装中断处理例程等操作。参考文献[3]详细论述了设备注册的方法,而这里主要讨论设备初始化时的配置方法。在本驱动程序中,设备初始化分两步:一是对9200的SPI控制器初始化,二是对5个MCP2515初始化。
在卸载设备驱动程序时会调用退出函数,退出函数主要完成设备的注销和中断释放。
参考文献[3]详细论述了中断处理例程的安装、设备注销和中断释放的方法,此处不再详述。
3.2.2 中断接收服务例程
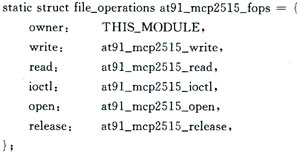
MCP2515收到CAN报文帧后,产生中断并将INT引脚置低。9200响应外部中断,并调用和外部中断相对应的中断处理例程。中断处理例程共有3个: at91_mcp2515_irq_handler_0响应IRQ0的中断, at91_mcp2515_irq_handler_1_2响应IRQ1的中断, at91_mcp2515_irq_handler_3_4响应IRQ2的中断。其中IRQ0只和一个MCP2515相连,而IRQ1和IRQ2分别被两个MCP2515所共享。IRQ0和IRQ1的中断处理流程分别如图5和图6所示,IRQ2与IRQ1的中断处理流程相同。
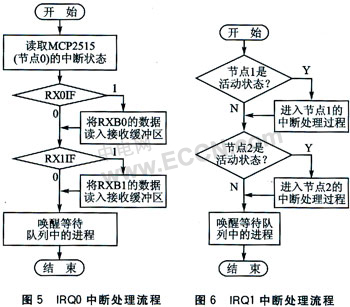
需要注意的是,在图5的处理流程中并没有清中断操作。这是因为采用了RX读缓冲区指令读取MCP2515RX缓冲区中的数据。该指令操作结束后,MCP2515会自动清除相应的接收中断标志位。
3.2.3 文件系统接口定义
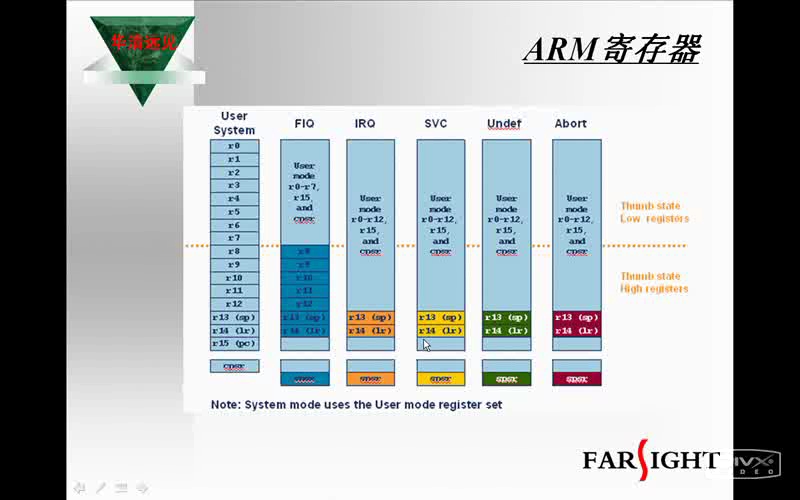
文件系统接口struct file_operations的成员全部是函数指针,这些指针指出了设备驱动程序所提供的入口点位置。本驱动程序所定义的file_operations为:
3.2.4 ioctl函数
ioctl函数用于对设备进行配置。我们在ioctl函数中实现了两个命令:IOCTRL_CONFIG_CAN_DEV用于配置节点的CAN总线波特率和报文滤波,IOCTRL_SET_OPER_MODE用于配置节点的工作模式。这两种配置命令所对应的配置参数都是指向应用层相应数据结构的指针,两个配置结构在3.1.2小节已经介绍过了。
用IOCTRL_CONFIG_CAN_DEV命令配置波特率和报文滤波时,在配置完成后,如果节点处于INACTIVE状态,则需要使能节点内部的接收中断,使能节点所对应的外部中断,并将节点状态设置为ACTIVE。在通常情况下,通过ioctl函数对需要配置的节点执行完IOCTRL_CONFIG_CAN_DEV命令后,还要再对配置过的节点执行IOCTRL_SET_OPER_MODE命令,使节点处于正常的工作模式。
3.2.5 关于竞争问题
本系统是单CPU系统,采用Linux 2.4.19内核,且是非抢占式的;同时,此设计的驱动程序也只允许一个进程打开并操作该设备。在这种情况下,驱动程序中所涉及的竞争问题主要就是中断处理程序内核代码和其他设备操作的内核代码之间的资源竞争。在上文中所提到的所有设备操作中,都要通过9200的SPI接口与MCP2515进行通信。9200与MCP2515进行通信都是以命令字节开始的,并且在一个命令操作过程中(一般会连续传输多个字节),片选和时钟是不能被禁用的,否则操作就会失败。因此,MCP2515的一个完整的命令操作就是一个临界区域,在对MCP2515进行一个命令操作的过程中必须禁用所有的中断,以保证命令操作的正常执行。在驱动程序中,采用local_irq_save和local_irq_restore函数对中断禁用和恢复,在这两个函数调用之间,就是对MCP2515执行一个命令操作的代码。
结 语
本文针对特有的应用需求提出的多路CAN总线接口和驱动程序设计,经过测试,可以稳定正常地运行。关于驱动程序的编译和运行方法,参考文献[3]有很好的说明。上层的测试程序编写也比较简单,但要注意数据结构的定义和底层驱动程序的一致性。本文侧重介绍设计的基本方法和实现基本的功能。MCP2515本身提供了许多的功能,在实现基本功能的基础上,也可以根据自己的应用需要再进行功能扩展。










评论