数字控制式LLC谐振变换器建模分析与验证
摘要:针对半桥LLC谐振变换器的建模及其验证展开分析,同时分析了数字控制对系统稳定性造成的影响,并给出采用数字控制时系统稳定性的解决方案。首先,通过扩展函数描述法得到传统的模拟域数学模型,并在Saber中搭建仿真模型,利用小信号分析法验证该数学模型的准确性,从而得出得到的系统数学模型具有参考性,由此提供了环路设计的基础;其次,采用数字控制,考虑到其离散特性,分析了数字控制对系统稳定性的影响,并通过Matlab仿真验证了该理论的正确性,最终设计出性能良好的数字PID补偿器;最后,针对实际应用场合,搭建实验平台,进行相关实验验证。
本文引用地址:http://www.eepw.com.cn/article/276365.htm前言
现今蓄电池充电器常用的充电拓扑有正激、Buck、Boost以及各种形式的谐振变换器,而谐振变换器凭借其软开关特性得到更加广泛的应用,其中半桥LLC谐振变换器结构简单,允许空载运行并具有较宽的输入电压范围,且通过磁集成技术可以提高整机的功率密度,具有明显的优势,因此文中选用半桥式LLC谐振变换器作为研究对象。此外,由于数字控制具有元器件少、控制灵活、容易实现复杂控制算法优点,所以文中选用数字控制。
蓄电池充电器主要工作于恒流或恒压输出模式,要求变换器具有良好的稳态跟踪性能,并且考虑到蓄电池在充电过程中,其所需要的充电电流会不断变化,即蓄电池负载并非始终保持恒定,此要求变换器具有较好的动态性能,能够较快跟踪到参考电流变化,而现在市场上的变换器不具备以上特性,所以需要对变换器的控制环路进行设计优化。首先采用扩展函数描述法[1]对其进行建模,得到开环数学模型,并验证该模型的准确性;其次,分析数字控制带来的计算延时、控制延时对传统数学模型稳定性的影响,并给出相应的解决方案并设计数字PID补偿器;最后根据实际应用参数,进行仿真和实验验证。
1 系统环路设计
1.1 扩展函数描述法建模
由于谐振变换器的谐振特性,其状态变量中含有许多开关频率处的信息,传统的状态空间平均法不再适用,因此采用扩展函数描述法(EDF)建立半桥LLC谐振变换器的数学模型。如图1所示为半桥式LLC谐振变换器原理图。

首先,选择激磁电感电流、谐振电感电流以及谐振电容电压作为状态变量,并根据拓扑结构,列写非线性时变状态方程:
 (1)
(1)
式(1)中:Lr为谐振电感,Lm为激磁电感、Cr1、Cr2为谐振电容。
其次,根据Fourier分解[2]将周期信号分解为正弦函数之和,只考虑基波分量,得到所需的近似大信号模型,系统稳态运行后,变量不随时间变化而变化,因此忽略模型中的时变分量,即可得到稳态工作点求解方程并转化成矩阵形式,最后在稳态工作点附近,进行变量分离,获取系统的小信号数学模型,并表示成矩阵形式。
 (2)
(2)
其中,


通过以上过程可以得到输出电压对开关频率的关系矩阵:
 (3)
(3)
为进行环路设计,首先需要验证上述方法得到的数学模型的准确性,如表1所示为实际系统参数。

在Saber中搭建仿真模型,逐点仿真。仿真验证结果如图2所示。

为了获得良好的系统动态和稳态特性,需加入补偿环节,因考虑系统的寄生参数[2]后,系统阶数较高,因此在设计补偿环路时,通过加入适当的零极点,来改善系统的频域特性。本文采用PID控制器[3],为实现零极点对消,将PID控制的表达式表示成:


pid控制相关文章:pid控制原理
dc相关文章:dc是什么
pid控制器相关文章:pid控制器原理
调压器相关文章:调压器原理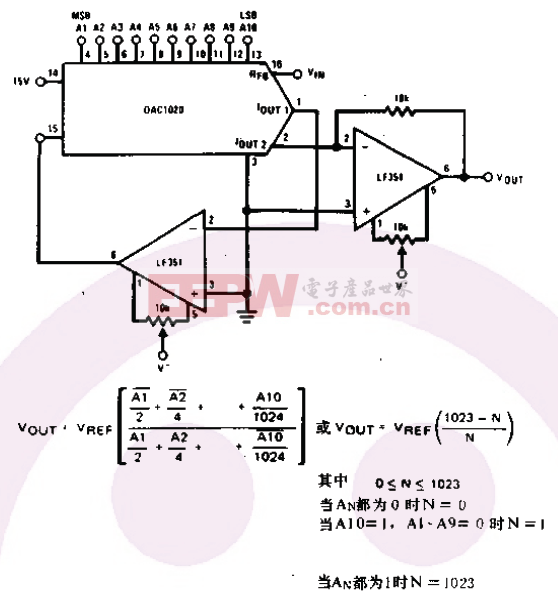

评论