基于DSP+CPLD的伺服控制卡的设计
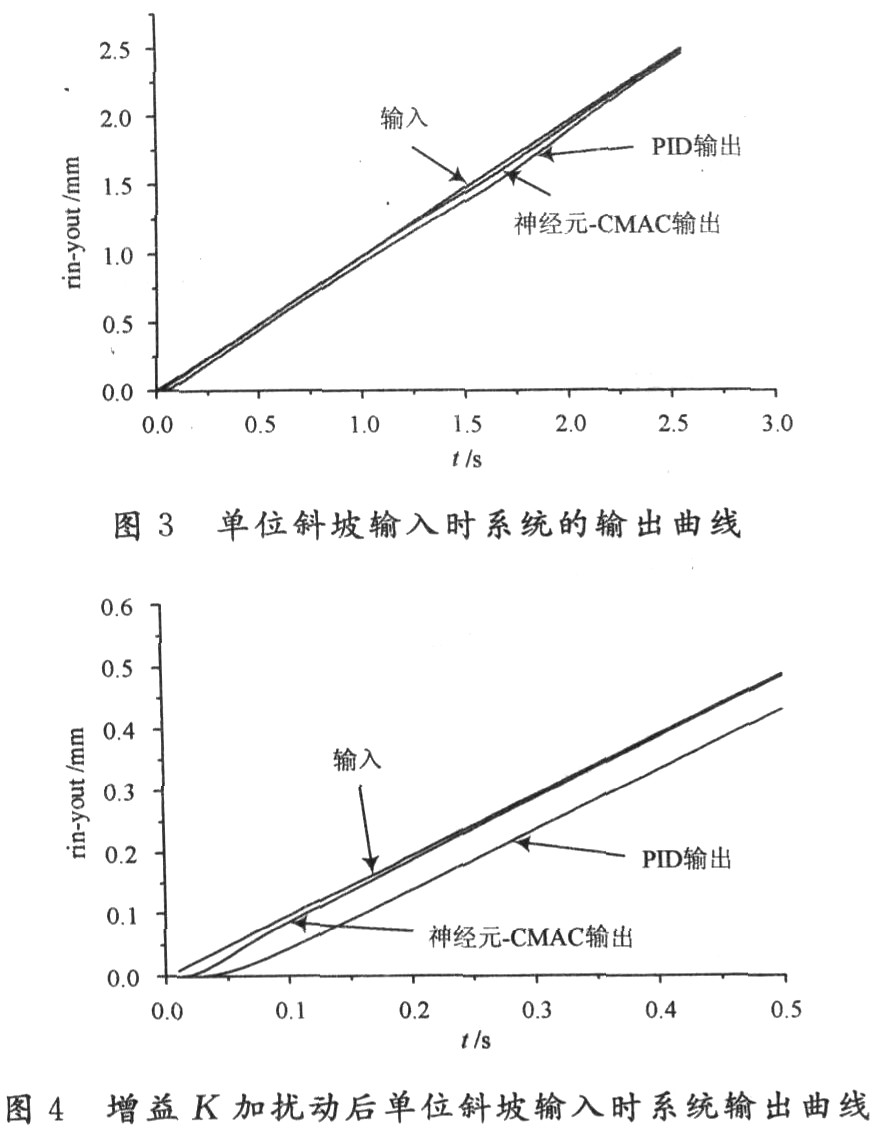
采用的单神经元PID及CMAC相结合的复合控制算法,完成对位置伺服控制器典型输入斜坡输入响应的仿真实验。
本文引用地址:http://www.eepw.com.cn/article/275087.htm图3和图4分别是位置伺服系统的单位斜坡输入响应曲线图,通过对图形的分析,可以看出,单神经元PID与CMAC相结合控制算法比常规PID控制算法有更小的跟随误差,直接决定该控制系统的控制精度。图4是在输出端加入lO%的阶跃扰动后,两种控制算法的输出曲线图,由图可知单神经元PID与CMAC相结合控制算法比常规PID控制算法有更好的抗干扰能力。
3 结 语
针对位置伺服控制系统的特点,设计了一种基于神经网络控制算法的伺服运动控制卡,将单神经元PID与CMAC并行控制的伺服控制算法应用在位置伺服系统的位置环控制。仿真结果证明了该控制算法较常规PID控制有更好的动态特性、控制精度、抗干扰能力,而且具有自适应功能。

pid控制相关文章:pid控制原理
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理














评论