电动自行车应用中的MCU
简介
本文引用地址:http://www.eepw.com.cn/article/272346.htm本文将主要探讨采用微控制器或可编程片上系统(PSoC)实现电动自行车的设计技术和相关挑战。当前业界的电动自行车系统采用微控制器以及外部信号调节和比较器电路来驱动三相电机;采用外部ADC和外部放大器支持不同的传感器输入;采用继电器驱动电路支持刹车灯、车头灯和转向灯;此外还可支持LED/LCD显示屏和温度测量等。
可编程SOC器件不但可作为电机控制、模拟测量以及直接驱动LCD显示屏的统一电路板系统用于电动自行车应用,而且还能支持电容式感应技术以取代键盘上的机械按键。此外,SOC器件还能利用内部PWM、MUX和比较器来驱动和控制三相电机,利用内部ADC和PGA来支持传感器输入电池监控,以及利用热敏电阻或RTD等温度感应器件来实现温度感应。该器件不但能直接驱动继电器,以支持刹车灯、车头灯和转向灯,而且能直接驱动LCD显示屏,以显示温度、电池状态、速度、骑行距离及各种错误/警告消息等。
采用基于IDE的工具,可为SoC设计出各种界面和逻辑。这些工具还能提供直接可用的组件模块,可用于设计更为复杂的逻辑,如监控界面的电容式传感器、支持模拟传感器和其它输入的ADC、驱动蜂鸣器的PWM、DAC以及段式、字符或图形化LCD显示屏等。因此,利用可编程SOC,电动自行车系统的开发和生产成本能够大幅降低。
图1所示为基本电动自行车系统的方框图:
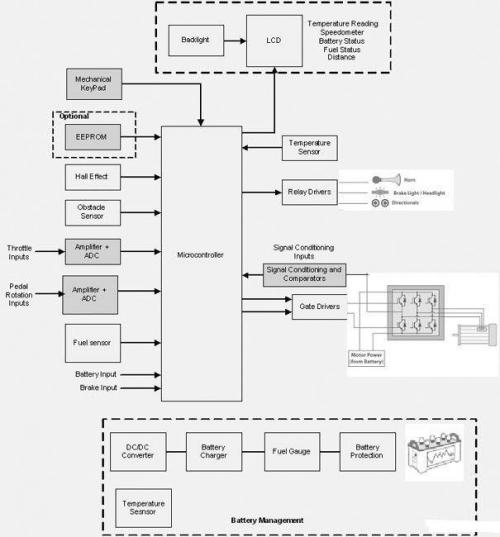
图1:电动自行车方框图
微控制器:微控制器通常用于不同传感器输入检测(如节流阀输入、温度传感器、电池输入、燃料传感器、障碍传感器等)、模数转换、输出比较组件等,并可驱动和控制三相无刷车用电机。采用电池供电的电动自行车系统需要超低功耗的微控制器。此外,微控制器也是中控锁系统的一部分,可用来与车辆中使用的各种不同外部器件进行通信。无论何时刹车,均可使用微控制器来自动停止电机旋转,从而避免电机磨损刹车片的速度超过标准的人力自行车。
轮毂电机:通常情况下,无论有无传感器(基于霍尔效应),均可采用无刷电机实现高效可靠的运行工作。
可再充电的铅酸/锂离子电池:电动自行车应用采用了从铅酸电池到锂电池等多种不同的电池类型。其中,可再充电的铅酸电池在电动车中的应用极其广泛。
显示屏与键盘:通常情况下,采用带背光的LCD显示屏不但能显示温度、电池输入、速度、骑行距离及错误/警告消息等,而且还能显示脚踏板辅助系统和能量生成的等级。电动车应用中也采用基于机械按键的键盘,而且键盘还可支持保护电动车的防盗功能。
电源管理:这个子系统可为各功能模块的运行提供电源,并监控电池工作。带比较器和分立逻辑的主机微控制器可用来管理铅酸电池。此外,这种方法也能为微控制器和用户提供关于电池的安全和关键信息。
原理
目前的电动自行车系统采用16位和32位微控制器。微控制器控制和管理车辆的所有功能和特性。一旦用户打开点火开关发动电动自行车,微控制器就能获得输入,从而启动三相无刷车用电机。微控制器可接收来自用户的各种车辆输入信号,并对车辆进行相应的操控。微控制器按照用户所选择的速度驱动三相无刷车用电机,电机的速度可根据用户的加速和制动传感器输入进行变化和控制。
微控制器采用内部或外部串行EEPROM(I2C/SPI型)来存储距离读数等数据。此外,微控制器还采用实时时钟(RTC)在显示屏上显示准确的时间。
温度测量由板上RTD或热敏电阻型温度感应器件来实现。电动自行车系统还能利用障碍传感器在泊车时获取附近车辆的信息。燃料传感器获取引擎中的燃料信息,微控制器也可监控电池输入并将其在LCD显示屏上显示。继电器驱动电路则用于切换刹车灯、车头灯和转向灯的开/关等。
供电部分由作为电源的可再充电铅酸或锂离子电池组成,且必须满足电池充电器的规定。电池输入向下转换为DC电压,以便为微控制器和其它电路提供动力。点火开关则可启用或禁用板上稳压器。此外,供电部分还可提供电池、过流、过热及启动故障状态保护电路等多种保护功能。OEM厂商也会对手机等外部设备的充电做出相应规定。
图2所示为基于可编程SOC的电动自行车系统:
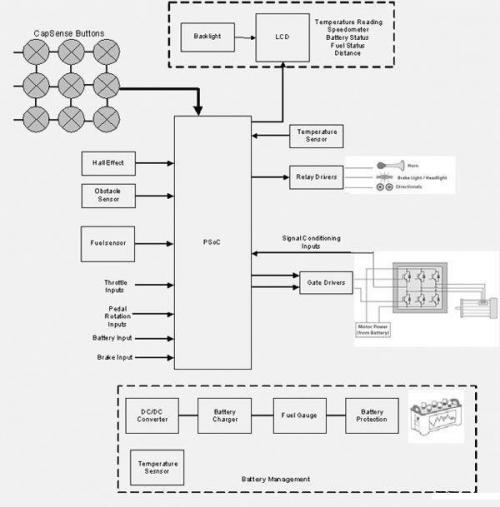
图2:基于PSoC的电动自行车解决方案方框图
电动自行车系统的实现
为给出电动自行车系统的实际实现方案,本文介绍了一款基于赛普拉斯PSoC 4的设计。PSoC 4器件完美集成了带数字可编程逻辑的微控制器、高性能模数转换、带比较器模式的运算放大器以及标准的通信和时序外设等。微控制器为32位的ARM Cortex M0,工作频率高达48 MHz,并可提供最大32 KB的闪存和最大4 KB的SRAM以及2 KB的内部EEPROM.
该实现方案采用板上6个P型通道(P-Channel)MOSFET和门驱动器电路来驱动三相无刷电机。PSoC 4器件带有内置PWM、时钟、多路转换器和比较器,可用来驱动和控制三相无刷电机。此外,内置的16位PWM将用于驱动控制电机的FET门驱动器电路。而PWM的占空比根据用户设置所需的速度而各不相同。
PSoC4带有内部运算放大器、PGA、比较器和12位1MSPS SAR ADC,可提供差动和单端模式,包括采样保持(S/H)功能。ADC可通过改变PWM占空比来控制电机速度,并测量不同的传感器输入以满足电池监控、低成本温度感应、障碍感应和燃料感应等需求。这样系统就无需采用任何外部放大器、ADC或比较器。
利用两个电流DAC(IDAC),该系统可具备通用感应功能,且能够利用任何引脚上的电容式感应技术。PSoC 4架构支持电容式感应组件,该组件同时支持手动和自动调校。采用电容式界面可帮助整个电动自行车系统实现防水性,同时也能直接驱动继电器,从而充分满足喇叭、刹车灯、车头灯、转向灯和LCD显示屏等需求。该器件的工作电压范围介于1.71V到5.5V之间,能与其它外部外设轻松连接,从而实现更多功能。此外,PSoC 4还支持两个独立的在运行中可重配置串行通信模块(SCB),此模块带可重配置的I2C、SPI或UART功能,可用于内外部外设通信。
该实现方案采用可再充电的铅酸或锂离子电池作为电源。输入电压通过板上降压稳压器进行下变频转换。1.71 V的较低工作电压和超低功耗运行,再加上冬眠和深度休眠模式,可支持唤醒时间和功耗折中方案,从而实现更长的电池使用寿命。
采用PSoC Creator IDE工具,我们能通过随时可用的组件模块设计出所有的接口和逻辑,包括面向模拟传感器和其它输入的SARADC和PGA;面向电机驱动应用的PWM、CLK、MUX和比较器等组件;面向直接驱动字符和段式LCD的组件;面向电动自行车应用中CAN协议接口的CAN组件;以及通过内部系统时钟进行实时测量、从而让系统不再需要外部时钟/振荡器电路的RTC组件等。
此外,PSoC Creator还支持工程师访问包括集成编译器工具链、RTOSes和量产编程器在内的完整的工具生态系统。有了PSoC Creator,开发人员就可利用分层原理图设计创建并共享用户自定义的定制外设。然后,他们能对所选定的组件实现自动布局布线,并集成简单的粘接逻辑(通常位于分立多路转换器中)。
过流保护用于关闭电机驱动PWM,因而可停止电机运行。PSoC 4器件采用基于比较器的PWM Kill信号触发,可在检测到过流情况时终止电机驱动。该模块的输入来自总线电流,其截止参考可设为电机消耗的最大电流。总线电流输入馈送到比较器和可配置的截止参考,并由DAC进行设置。如果总线电流低于参考阈值,那么比较器输出设为高。比较器输出连接到PWM的“KILL”信号输入。当“KILL”输入为高时,PWM输出关闭,从而可避免电机受损。该完整模块的实现方案将采用PSoC creator组件,且无需设计人员编写的任何固件。

pwm相关文章:pwm是什么
比较器相关文章:比较器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
蜂鸣器相关文章:蜂鸣器原理 霍尔传感器相关文章:霍尔传感器原理







评论