如何利用传感器融合增强设备性能
动态精度
本文引用地址:http://www.eepw.com.cn/article/272212.htm动态精度被定义为设备在运动时,测量到的设备方位与实际设备方位之间的偏差。由于在运动期间涉及到旋转加速度,测量起来更加困难。动态精度是在手机以不同运动模式(8字舞、慢速线性、快速和慢速旋转以及游戏动作)运动时,通过采集航向、俯仰和滚转等成套数据进行计算的。所有数据都以最快可能的数据速率进行采集。
在具有低动态精度的设备中,最终用户可以看到屏幕上的移动与设备实际运动之间有很大偏差。这在增强现实应用中特别引人注意,因为增强单元的移动与现实世界不是同步的。这也是用户在使用虚拟现实几分钟后就感到不满意的原因之一。
虽然直接关系不是很明显,但大误差的动态精度也是室内导航应用性能差的主要原因。由于用户在已知固定点之间导航(比如从Wi-Fi或蓝牙信标开始),传感器数据可用于计算轨迹。然而,航向误差将随着时间的推移而累积,因此具有15°较差动态精度的设备很容易在20s~30s时间内产生超过100°的累积误差。诸如地图匹配等更高层处理也许可以做些修正,但代价是更大的功耗(图3)。
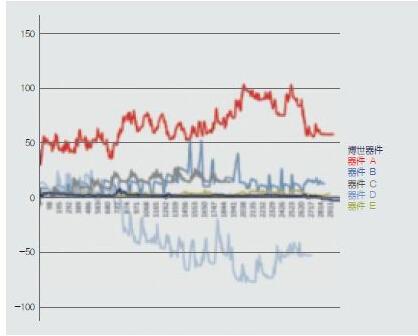
图3:方位随时间发生偏离。
校准时间
校准时间被定义为在纯净的磁场环境中校准设备中的磁力传感器,使之从未校准状态到完全校准状态所需的时间。所有磁性传感器都需要进行校准,但用于校准的方法定义了最终用户是否需要校准以及如何去校准。
一些设备采用8字舞校准方法,即提示最终用户将设备在空气中做8字运动完成设备的校准。即使是由有经验的测试人员来做,这种方法也要花5s~6s的时间才能完成设备校准。
具有较短校准时间的设备使用陀螺仪校准磁力传感器,这意味着校准可以在背景中运行,所要求的设备移动幅度要小得多。这些移动通常在正常操作中进行,最终用户永远不必主动去校准传感器。博世传感器技术公司的快速磁力校准(FMC)算法就是使用后一种方法来确保较短的校准时间。
方位稳定时间
方位稳定时间被定义为“运动之后”到达精确、稳定方位状态所需的时间。方位稳定时间应尽可能短,以便用户看不到他们停止移动设备与设备停止移动并稳定到正确位置之间的延迟。当设备的静态和动态精度都很差时,设备上的这种延迟就很明显,因为需要更多时间校正移动中累积的误差。这种效应在需要实时响应的游戏和虚拟/增强现实应用中尤其令人讨厌。
从详细的评估和分析来看,显然本文所述的传感器融合现在可以广泛应用于专业级和消费级市场。现场试验表明,用户可以在性能和精度方面获得有价值的升级。虽然硬件和软件方面的概念和工程技术比较复杂,但对开发人员来说,从当前传感器融合过渡到这种先进解决方案的任务却相对简单。
传感器融合技术现在已经发展到相当成熟的阶段。通过将传感器和传感器融合构建模块设计到相同封装中,可以确保这些单元得到最优化,并能够很好地协同工作。系统设计师不再需要在组装、优化和调试传统“永远在线”子系统方面花费时间,因为通过设计,每个器件都对最高精度和最低功耗做了优化。
这种高度的技术和设计创造性带给开发人员的优势,可以给OEM厂商提供巨大好处,他们不仅能够向市场推出高度差异化的产品,而且其向用户提供的整个新一代电子设备还将具有显著改进的性能和功效。

pid控制相关文章:pid控制原理
传感器相关文章:传感器工作原理
pid控制器相关文章:pid控制器原理
风速传感器相关文章:风速传感器原理 加速度计相关文章:加速度计原理 倾角传感器相关文章:倾角传感器原理










评论