LLC谐振变换器的轨迹控制研究
图4中以u`CN(i`LN)为坐标轴的圆弧CD,其圆心为(1,0),半径为

依同样的分析方法,可求得下半周期各谐振模态的时域方程与轨迹方程。
2 轨迹控制法则的推导与实现
根据状态平面分析方法可知,LLC谐振电路在一个工作周期内,其各谐振模态所对应的状态变量轨迹组成一个闭合的环,每一个谐振模态对应其中的一段圆弧。要实现轨迹控制,必须通过控制开关管的导通时刻或者关断时刻来制定控制法则。为实现两个不同轨线的工作状态转换,并获得良好的动态性能,就必须根据控制指令计算出最忧的开关管导通或关断时刻。具体到LLC谐振电路,在CCM模式下,可选择通过控制开关管的关断时刻来达到轨迹转换的目的,例如图4中轨线W1和W2的开关频率不同,分别为fa和fb。图4中轨迹转换的过程分析如下:
由轨线W1转换到W2,如果不改变频率发出状态轨迹转换控制命令,则轨线的行进过程为ABCDEF,并且,该轨线在经过BC与DE两点时状态变量iLN发生突变,这是因为该时刻回路谐振元件由2个变成3个,之后又由3个变成2个,状态变量对应的坐标轴也相应的由u`CN(i`LN)变成uCN(iLN)后又变成u`CN(i`LN);由轨线W1转换到W2时,如果有状态轨迹转换控制命令改变开关管的关断时刻,则轨线的行进过程变为ABCGHJ,开关管Q1、Q4的关断时刻相应地由原轨线W1的D点变为新轨线W2的G点,并且反并联二极管D2和D3随之自然导通,到J点时谐振电流下降到零并开始反向,下半周期状态变量将继续按转换后的新轨线W2的轨迹变化。同理可分析图4中由轨线W2转换到W1的实现过程。
分析式(8)可知,在原轨线CD段圆弧对应时间T1的基础上,在DSP中根据上述算法很容
![]()
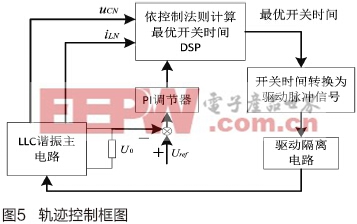
沿新轨线行进直到下一次状态轨迹转换控制命令到来。轨迹控制实现的逻辑框图如图5所示。

dc相关文章:dc是什么


评论