基于OMAP3530平台的车道线识别检测的实现
程序段2设置像素格式
本文引用地址:http://www.eepw.com.cn/article/269117.htm(4)申请缓存区,并获取每个缓存的信息
V4l2捕获的数据,是存放在内核空间里的,用户不能直接访问该段内存,必须通过某些方法来转换地址。这里我们采用mmap映射方式,相关代码见程序段3.
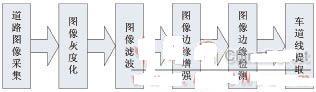
图1车道线识别算法流程图

图2路面边缘示意图
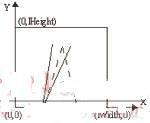
图3干扰直线
———————————————————————
req.count=4;
req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory=V4L2_MEMORY_MMAP;
ioctl(fd,VIDIOC_REQBUFS,
———————————————————————
程序段3映射内核空间到用户空间
(5)开始采集视频
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON,
(6)取出缓冲区中已经采样的缓存
ioctl(fd,VIDIOC_DQBUF,
(7)停止采集和关闭设备
int close_v4l2(void)
{ ioctl(fd, VIDIOC_STREAMOFF,
…}
实验测试
本文设计的视频图像采集模块及测试演示系统实物图如图4所示。
在学校外的新兰路上采集到了回旋曲线、抛物线、直线三种结构化道路图像,对采集到的三种道路图像应用车道线识别算法处理,提取出车道标志线,效果图如5所示。从效果图中可以看出该算法基本上对由光照的强弱、对阴影区域和对道路的质量等造成的问题影响不大,表现出很好的识别效果。
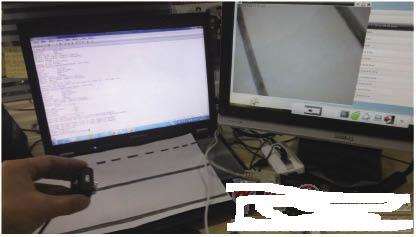
图4视频图像采集演示系统

图5三种结构化道路车道线提取效果图
全息投影相关文章:全息投影原理









评论