节能型循环泵控制器
2.3 空间矢量调制(SVM)
本文引用地址:http://www.eepw.com.cn/article/265861.htm电机控制中常用的两电平三相逆变器的拓扑结构如图 2-4 所示。三对开关 Tl
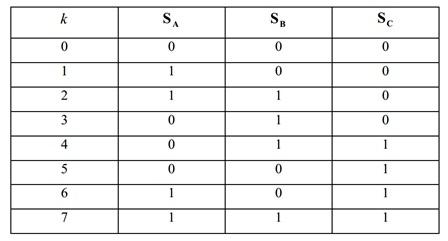
-T2、T3-T4 和 T5-T6 可构成 8 种导通状态,在表 2-1 中分别用序号k = 0,1,2,…,7 来表示。为避免短接,逆变器每条臂上的两个开关不能同时导通,将上边开关导通而下边开关断开的状态定义为 1,否则为0。
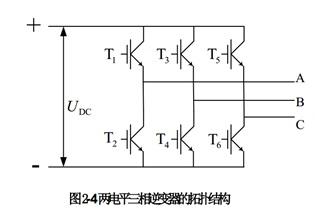
表2-1 元件逆变器开关 的8种标通状标
三对开关管对应的 8 种状态所对应的电压矢量如图 2-5 所示。
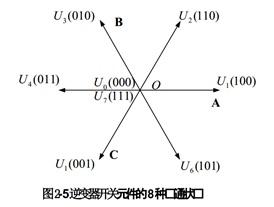
对于任意电压矢量Us 可由临近的两个电压矢量线性时间组合来合成,图 2-6 所示的是在第一扇区的情况,
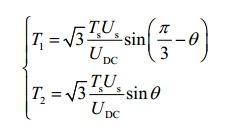
由三角形的边角关系可得
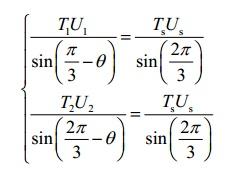
从而可以得到:
零电压矢量作用的时间为:
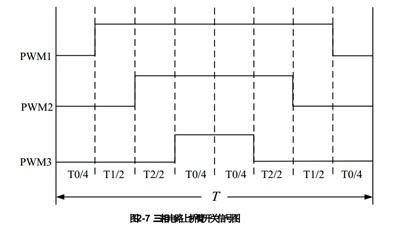
为使电压波形对称,将各电压矢量作用时间一分为二,并使三相桥臂每个开关管各开关一次,得到上桥臂开关信号如图 2-7。则 和 作用的时间为 。同理,可以得到其它扇区相应电压矢量的作用时间和开关信号。
3、基于滑模观测器的无位置传感器 PMSM 控制系统
3.1 电机数学模型
矢量控制方法的实现需要当前转子位置信息,为了准确的施加计算产生的电压矢量,需要当前转子位置完成坐标变换。在没有速度/位置传感器的电机控制系统中,位置信号没有办法直接检测得到,因此需要设计相应的位置和速度估计模块。
PMSM 在αβ 定子静止坐标系的数学方程为:
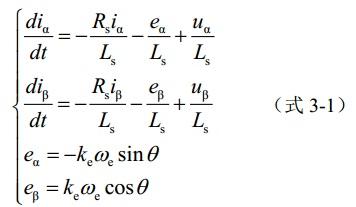
式中,
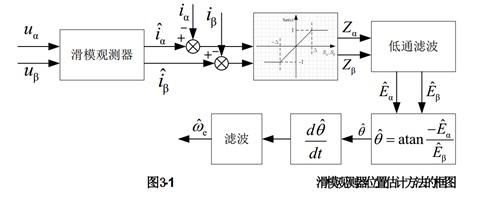
由式 3-1 可以看出,反电动势的相位中包含有转子位置信息,可以通过对反电动势进行观测,从而估计出转子位置。
矢量控制相关文章:矢量控制原理















评论