一款基于DSP的三相SPWM变频电源电路的设计
A/D采样子程序
本文引用地址:http://www.eepw.com.cn/article/264227.htm主要完成线电流采样和线电压采样。为确保电压与电流信号间没有相对相移,本部分利用TMS320F28335片上ADC的同步采样方式。为提高采样精度,在A/D中断子程序中采用均值滤波的方法。
对A相电压和电流A/D的同步采样部分代码如下:
interrupt void adc_isr(void)
{
if(counter==0)
{
receive_a0_data[i++] = AdcRegs.ADCRESULT0>>4;//右移四位
receive_b0_data[j++] = AdcRegs.ADCRESULT1>>4;//右移四位
}
if(counter>=1)
{ //对结果取平均,平滑滤波
receive_a0_data[i++] = (receive_a0_data[i0++]+(AdcRegs.ADCRESULT0>>4))/2;
receive_b0_data[j++] = (receive_b0_data[j0++]+(AdcRegs.ADCRESULT1>>4))/2;
}
if(i==512) {i=0;i0=0;}
if(j==512) {j=0;j0=0;counter++;}
AdcRegs.ADCTRL2.bit.RST_SEQ1 =1;//复位排序器
AdcRegs.ADCST.bit.INT_SEQ1_CLR = 1;//清中断标志位
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;//开中断应答
}
数据处理算法
本系统主要用到以下算法:(1)SVPWM算法(2)PID调节算法(3)频率检测算法
SVPWM算法
变频电源的核心就是SVPWM波的产生,SPWM波是以正弦波作为基准波(调制波),用一列等幅的三角波(载波)与基准正弦波相比较产生PWM波的控制方式。当基准正弦波高于三角波时,使相应的开关器件导通;当基准正弦波低于三角波时,使相应的开关器件截止。由此,逆变器的输出电压波形为脉冲列,其特点是:半个周期中各脉冲等距等幅不等宽,总是中间宽,两边窄,各脉冲面积与该区间正弦波下的面积成比例。这种脉冲波经过低通滤波后可得到与调制波同频率的正弦波,正弦波幅值和频率由调制波的幅值和频率决定。
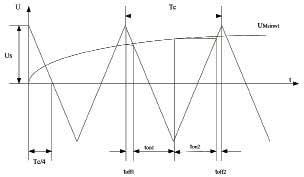
图7不规则采样法生成SPWM波原理图
本文采用不对称规则采样法,即在三角波的顶点位置与低点位置对正弦波进行采样,它形成的阶梯波更接近正弦波。不规则采样法生成SPWM波原理如图7所示。图中,Tc是载波周期,M是调制度,N为载波比,Ton为导通时间。
由图7得:
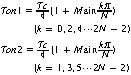
当k为偶数时代表顶点采样,k为奇数时代表底点采样。
SVPWM算法实现过程:
利用F28335内部的事件管理器模块的3个全比较单元、通用定时器1、死区发生单元及输出逻辑可以很方便地生成三相六路SPWM波形。实际应用时在程序的初始化部分建立一个正弦表,设置通用定时器的计数方式为连续增计数方式,在中断程序中调用表中的值即可产生相应的按正弦规律变化的SPWM波。SPWM波的频率由定时时间与正弦表的点数决定。
SVPWM算法的部分代码如下:
void InitEv(void)
{
EALLOW;
GpioMuxRegs.GPAMUX.all=0x00FF;
EDIS;
EvaRegs.EVAIFRA.all = 0xFFFF;//清除中断标志
EvaRegs.T1PR= 2500;//定时器1周期值;定时0.4us*2500=1ms
EvaRegs.T1CMPR = XPWM;//比较值初始化
EvaRegs.T1CNT = 0;EvaRegs.T1CON.all = 0xF54E;//增模式;TPS系数80M/32=2.5M;T1使能;
EvaRegs.ACTR.all = 0x0006; //PWM1,2低有效
EvaRegs.DBTCONA.all = 0x0534; //使能死区定时器1,分频80M/32=2.5M,死区时
//间5*0.4us=2us
EvaRegs.COMCONA.all = 0xA600; //比较控制寄存器
EvaRegs.EVAIMRA.all = 0x0080;
}
PID调节算法
在实际控制中很多不稳定因素易造成增量较大,进而造成输出波形的不稳定性,因此必须采用增量式PID算法对系统进行优化。PID算法数学表达式为
Upresat(t)= Up(t)+ Ui(t)+ Ud(t)
其中,Up(t)是比例调节部分,Ui(t)是积分调节部分,Ud(t)是微分调节部分。
本文通过对A/D转换采集来的电压或电流信号进行处理,并对输出的SPWM波进行脉冲宽度的调整,使系统输出的电压保持稳定。
PID调节算法的部分代码如下:
float PIDCalc( PID *pp, int NextPoint )
{
int dError,Error;
Error=pp->SetPoint*10-NextPoint; //偏差
pp->SumError+= Error; //积分
dError=pp->LastError-pp->PrevError; //当前微分
pp->PrevError = pp->LastError;
pp->LastError = Error;
return
((pp->Proportion) * Error //比例项
+ (pp->Integral) * (pp->SumError) //积分项
+ (pp->Derivative) * dError); //微分项
}
频率检测算法
频率检测算法用来检测系统输出电压的频率。用TMS320F28335片上事件管理器模块的捕获单元捕捉被测信号的有效电平跳变沿,并通过内部的计数器记录一个周波内标频脉冲个数,最终进行相应的运算后得到被测信号频率。
实验结果
测量波形
在完成上述硬件设计的基础上,本文采用特定的PWM控制策略,使逆变器拖动感应电机运行,并进行了短路、电机堵转等实验,证明采用逆变器性能稳定,能可靠地实现过流和短路保护。图8是电机在空载条件下,用数字示波器记录的稳态电压波形。幅度为35V,频率为60Hz.
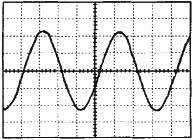
图8输出线电压波形
测试数据
在不同频率及不同线电压情况下的测试数据如表1所示。
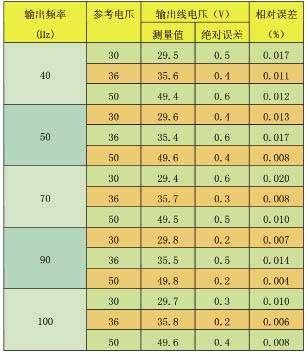
表1不同输出频率及不同线电压情况下实验结果
结果分析
由示波器观察到的线电压波形可以看出,波形接近正弦波,基本无失真;由表中数据可以看出,不同频率下,输出线电压最大的绝对误差只有0.6V,相对误差为1.7%.
结束语
本文设计的三相正弦波变频电源,由于采用了不对称规则采样算法和PID算法使输出的线电压波形基本为正弦波,其绝对误差小于1.7%;同时具有故障保护功能,可以自动切断输入交流电源。因此本系统具有电路简单、抗干扰性能好、控制效果佳等优点,便于工程应用,具有较大的实际应用价值。

pid控制相关文章:pid控制原理
dc相关文章:dc是什么
手机电池相关文章:手机电池修复
pid控制器相关文章:pid控制器原理
电源滤波器相关文章:电源滤波器原理
衰减器相关文章:衰减器原理












评论