基于PSoC®4 的PMSM无传感器矢量控制
1. 基于PSoC®4 的无传感器矢量控制方案
本文引用地址:http://www.eepw.com.cn/article/263243.htmPSoC4简介
PSoC®4 是基于ARM Cortex-M0 CPU的可编程嵌入式系统控制器家族,它集合了可编程模拟资源、可编程内部互联、用户可编程数字逻辑、通用的固定功能外设计以及高性能的ARM Cortex-M0 CPU子系统。相对于PSoC3、PSoC5系列产品的各个方面, PSoC®4都做了很大的改进。PSoC®4现包含CY8C4100 和CYCY8C4200两个产品系列,PSoC4100系列是基于ARM内核的最低成本的PSoC,它将PSoC的灵活性和高集成度引入对成本敏感的大批量生产的产品中。PSoC4200系列拥有速度更快的处理器,更高的ADC采样速度,以及基于PLD的增强型通用数字模块(UDB)。以下概括了其主要特性。
· 高性能 Cortex-M0 CPU 内核。基于48 MHz ARM Cortex®-M0 中央处理器 , 支持单周期乘法。
· 固定功能以及可配置的数字模块。包括四个独立的可支持中央对齐的PWM,支持互补的可编程死区及同步ADC操作;两个可工作为SPI/UART/I2C 串行通信接口的串行通信模块(SCB);
· 高性能模拟系统。包括一个支持零开销通道切换功能的12位1 Msps ADC; 两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器; 两个低功耗比较器;一个电容感应(CapSense)模块,提供极佳的信噪比和防水功能;两个电流数模转换器 (IDAC)。
· 高度可编程的数字逻辑。四个可编程数字逻辑模块(UDB),每个包含两个微型的可编程逻辑阵列和一个8位数据运算单元 。
· 灵活可编程的内部互连。
基于PSoC4的无传感器矢量控制方案
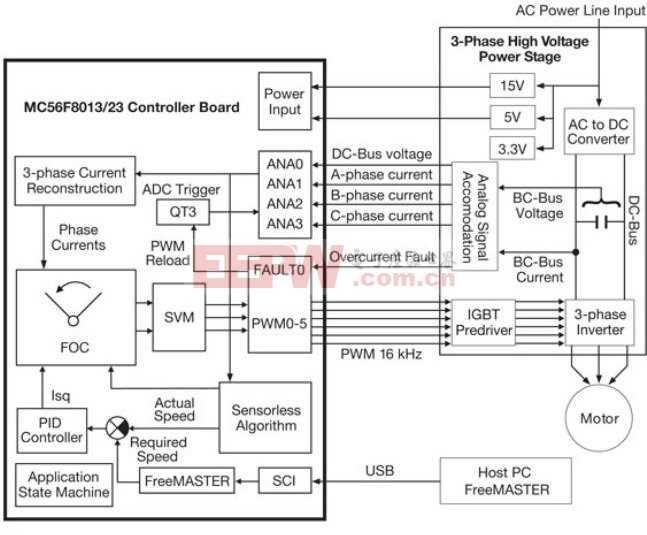
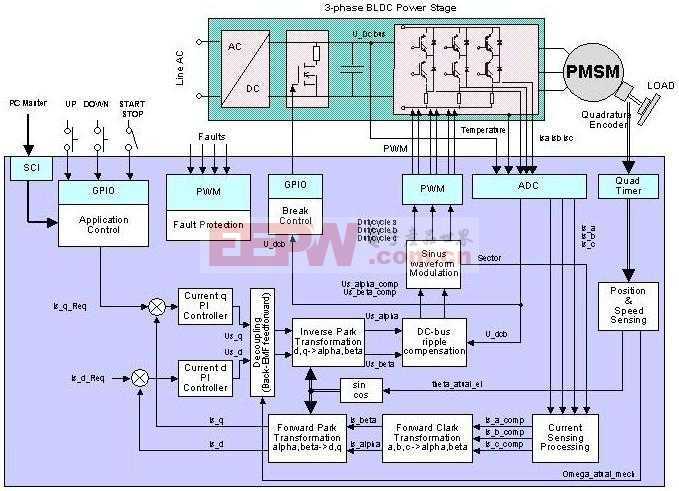
PSoC4®内部集成四个独立的可支持中央对齐、互补的可编程死区及同步ADC操作的TCPWM模块;一个支持零开销通道切换功能的12位1 Msps ADC; 两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器。丰富的片内资源可将主控电路所需芯片集成到一片芯片中,实现高度集成化。图2显示了PSoC4无传感器FOC硬件控制框图。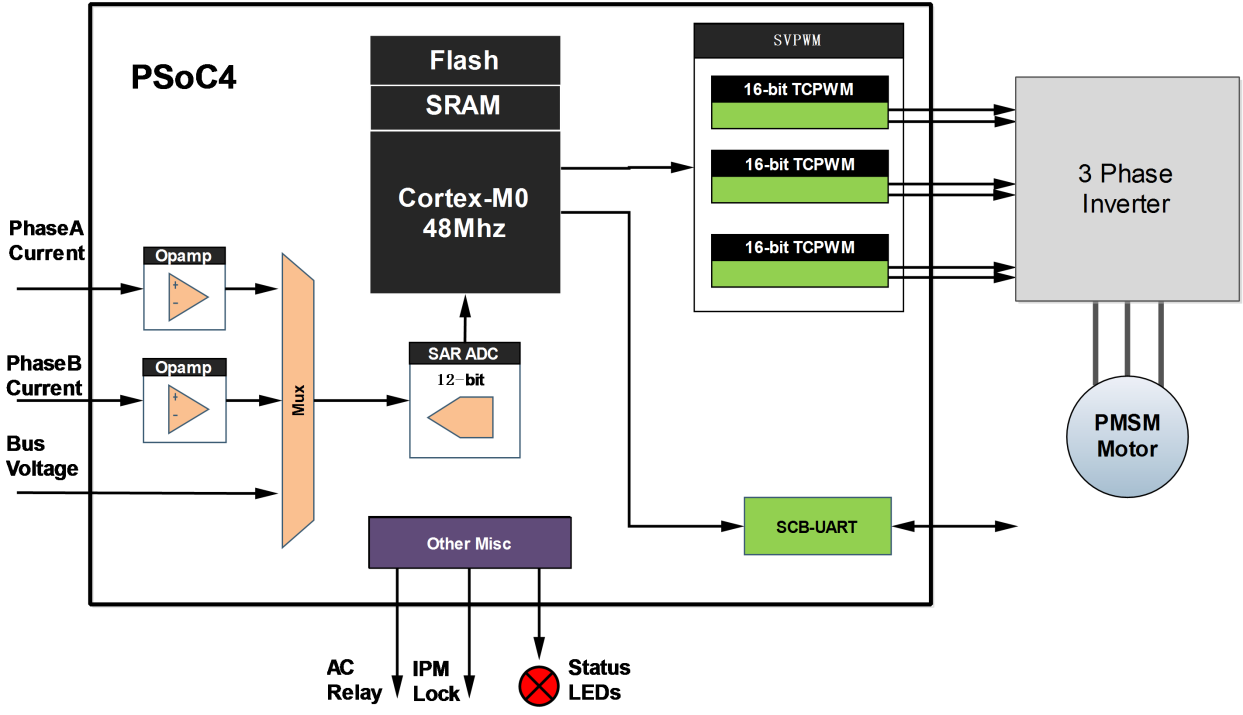
图2 PSoC4 无传感器FOC硬件控制框图
电流检测电阻上的信号直接进入PSoC4内部运算放大器,经放大后通过内部模拟多路选择器进入高速SAR ADC采样。采样后由Cortex-M0进行FOC算法计算,更新TCPWM占空比,驱动PMSM运转。
相对于其他解决方案,基于PSoC4的无传感器FOC解决方案具有以下特点优势:
1) 采用高性价比的Cortex-M0内核。Cortex-M0是市场上现有的最小、最节能的ARM处理器,代码占用空间小,能以8位处理器的价格获得32位处理器的性能,可明显节约系统成本。
2) 内部集成两个支持比较器模式及SAR ADC输入缓冲功能的运算放大器。目前市场大部分解决方案均需外部运放完成电流采样,采用PSoC4可从系统BOM表中移除外部运放,减少系统成本。
3) 内部集成两个低功耗比较器,可用于硬件保护或错误信号处理。市场常用解决方案大部分采用外部比较器完成此功能。采用PSoC4可进一步减少BOM,降低成本。
4) 减少PCB空间及BOM成本。由于PSoC4集成了电机控制所需大部分外设及其他丰富的模块,可实现高度集成化的设计。
5) 固件IP保护。PSoC提供了极强的软件/硬件IP保护能力,这对电机应用尤其重要。
6) 灵活的通讯接口。PSoC特殊的可编程架构提供了极为灵活的通讯接口,可满足各种应用的需求。
基于PSoC4的设计实例
PSoC 4采用PSoC Creator集成设计环境,PSoC Creator允许用户拖放预先配置好的、可随时投产的模拟和数字IP模块,也就是PSoC组件到自己的设计之中,并将其按照多种应用需求进行配置,实现软硬件协同设计,创建真正属于自己的器件。PSoC4能提供数十种免费的PSoC组件(Components™), 可适用于很多类应用.
1) 原理图设计
主控电路部分最核心的有两部分:PWM及电流采样,我们将重点讨论着两部分的设计过程。与PSoC3、PSoC5相比,PSoC4增强TCPWM模块的功能。TCPWM包括四个16位的周期长度用户可编程的计数器,这些计数器之间可以进行功能同步。每个模块包含一个捕获寄存器、一个周期寄存器以及一些比较寄存器。每个模块都支持互补的可编程的死区,还支持一个关断输入信号来强迫输出信号进入预先设定的状态。
如图3所示,从PSoC Creator中拖放三个TCPWM模块,配置TCPWM的工作模式为中央对齐,带死区的双路互补输出模式。三对PWM输出可分别作为U、V和W相桥臂驱动信号(如PWM_U_Upper, PWM_U_Lower)。同时在任一TCPWM模块的UN事件输出(下溢信号,用来指示计数器向下计数达到“0”)触发PWM中断(PWM_MainLoop_ISR),用于进行FOC计算并更新占空比,同时在任一TCPWM模块的OV事件输出(上溢信号,用来指示计数器向上计数达到周期寄存器中的值)触发ADC中断,用于采样相电流及母线电压等。图中的控制寄存器(PWM_Ctrl_Reg)还可以同时使能或禁止六路PWM输出。PSoC灵活的可编程特性可轻松实现了三对严格同步的互补对称PWM及其更新逻辑,这样可以使工程师将更多的时间专注于算法层面,提供产品的竞争力。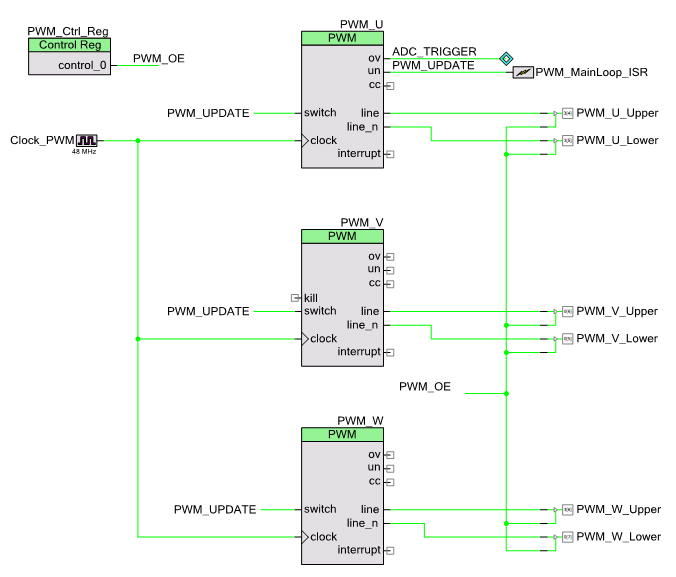
图3三相PWM原理图
采样部分主要负责完成两相电流及母线电压采样。如图4所示,电流检测电阻上的信号直接进入芯片内部运放放大器(Opamp_1, Opamp_2),电路形式采用差分放大形式,相关阻容在芯片外部。信号经放大器放大后直接由内部进入SAR ADC模块进行采样。SAR ADC模块能够实现最高1Msps的单通道采样,支持零开销通道切换功能。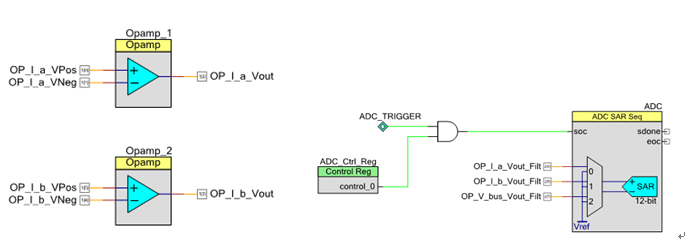
图4 采样部分原理图
2) 程序设计
主控程序首先会初始化和配置PSoC®4的内部资源,然后进入主循环。主循环主要检测用户的起停命令和速度给定,决定电机的运动状态;并完成一定的调试输出功能。FOC主算法全部在PWM中断中完成,主要完成读取ADC采样结果,完成坐标变换,PID控制,SVPWM输出及更新占空比等操作。具体流程图如图5所示。
图5 程序流程图
3) 实验结果
在PSoC Creator环境下编译工程,并连接PSoC4开发板,三相全桥驱动板与PMSM电机,通电后电机可正常运行。图6显示了电机相电流波形。从测试结果可以看出,电流波形平滑,正弦度很好。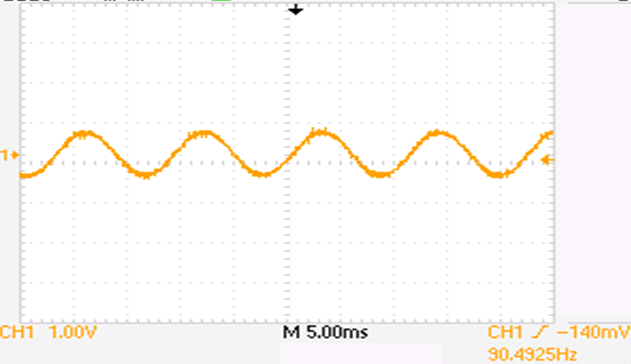
图6 相电流波形图
2. 小结
上述实例介绍了如何在PSoC®4 平台上实现PMSM无传感器矢量控制。PSoC®4作为Cypress最新推出的产品,针对电机控制做出了富有特色的优化。凭借片内丰富的资源及高度的灵活性,用户可以轻松设计出高度集成化、低成本、性能优越的PMSM矢量控制系统,提高产品的核心竞争力。
参考文献
[1]. PSoC® 4: PSoC 4100 Family Datasheet
[2]. PSoC® 4: PSoC 4200 Family Datasheet
[3]. PSoC® 4 Architecture TRM
[4]. PSoC 4100/4200 Family PSoC® 4 Registers TRM (Technical Reference Manual)
[5]. AN79953 - Getting Started with PSoC® 4

比较器相关文章:比较器工作原理
传感器相关文章:传感器工作原理
风速传感器相关文章:风速传感器原理 矢量控制相关文章:矢量控制原理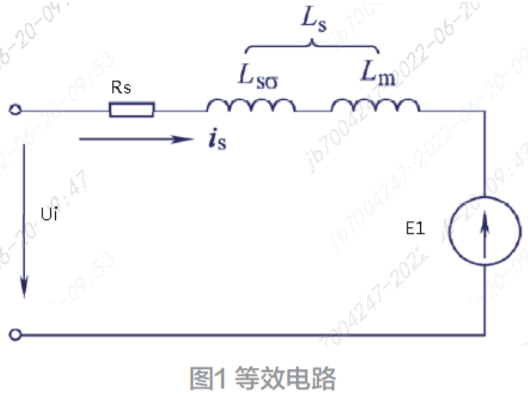











评论