ADAS方案转向R-Car平台,强化主动式安全机制
不只是环视,在主动安全上更进一步
本文引用地址:http://www.eepw.com.cn/article/263194.htm“ADAS通常包括360度环视,车道保持,防撞三部分,而竞争方案实现的全景(视觉辅助系统)只是ADAS三分之一的功能。对于视觉辅助系统,图像处理器仅须具备影像校正和显示功能;而对于车道保持,防撞等驾驶警示/辅助系统则要能进行影像辨识,技术难度更高一个级别。” 胡越强指出。
世强此次带来的这套环视ADAS系统方案具有强大的图像处理能力,能实现超清晰图像和高品质色彩还原;完美的画面明暗表现,来自高动态范围的自动调整;且只有极低的CPU占有率和功耗。此方案可以适用于汽车安全系统,如车道偏离警告系统(LDW)、车道保持辅助系统(LKAS)等典型的ADAS应用。如下图4所示为世强ADAS架构。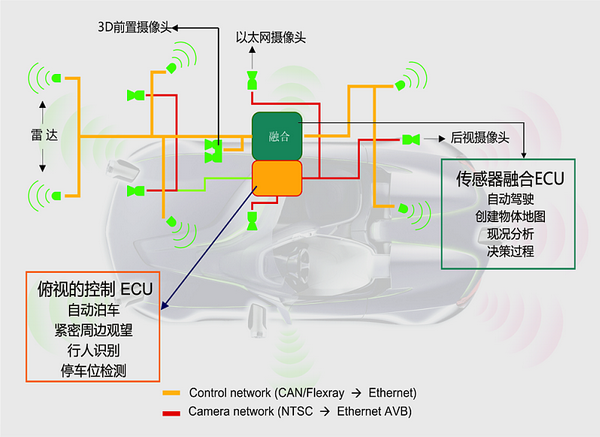
图4. 世强高级汽车环视辅助驾驶系统方案架构。
从图中可以看到,该方案具有6个数字摄像头,可以实现360度环视功能。而传感器融合ECU则能够帮助驾驶员创建物体地图,进行现状分析,还可以辅助驾驶员做出决策。俯视的控制ECU能实现自动泊车,紧密周边观望,行人识别,停车位检测。下图是现场的Demo演示。

图5. 世强演示高级汽车环视辅助驾驶系统方案demo。
图6. 实例展示。
实例展示1——两种标定模式可以选择
该方案有全自动标定模式和精准标定模式两种标定模式可以选择。“ 我们的全自动标定模式是强大、可靠的,并不需要相机安装角度的苛刻要求,适应大规模生产。”胡越强指出。
依托动态范围控制(DRC ,Dynamic Range Control)功能,可以实现亮度控制,还能调整复合视频亮度,补偿过亮和过暗,以便驾驶员更清晰地看清图像显示。这使得在光照条件很差,或恶劣环境条件下,采用半自动精准校定工具,提供最好的标定结果。
实例展示2——超级虚拟相机模式
“我们在后视的时候,有一个鱼眼矫正功能,鱼眼会让驾驶员感到图象不直观,我们采用硬件矫正的功能,我们通过矫正曲线拉直,还原成一个真实的视图。” 胡越强说道。
图像渲染器(IMR, Image Render Engine)视点转换引擎可实时制作出因视频输入或场景而异的视点俯视图像,利用三角网格校正失真的模式、自动生成矩形网格内的顶点数据,对图像进行失真校正,旋转,缩小或放大。
“超级虚拟的相机模式,让我们可以生成在任意视角下的虚拟视图,任意使用虚拟相机参数,焦点,生成视图,鱼眼和针眼相机都适合。”
实例展示3——基于环视基础的车道偏离预警系统
基于环视的车道偏离技术打开了新的领域,扩展了环视驾驶辅助系统的应用。
实例展示4——环视俯视画面的多种选择
俯视图可视范围可扩展,俯视图的分割或融合可选择。俯视图的可见区域大小能够一键更改,具有完美拼接和分割效果,还有多种模块的备选(包括:3D效果的环视界面、DVR 、基于3G的视频查看和信息管理、语音倒车指南等)。
未来向更智能化ADAS演进
以上的4个实例展示只是世强360度环视ADAS高级汽车驾驶辅助系统方案所能实现的一部分功能展示。未来,世强将和前装车厂更加紧密的合作,开发更加智能化的ADAS方案,实现更深层次的主动安全高级驾驶辅助功能。
“自动驾驶是在先进驾驶辅助系统——ADAS技术基础上的演进,ADAS 是一个正在发展的应用,OEM厂已经为汽车驾驶定义了长期的目标。预测到2020年会逐步实现主动安全,最终会以2025年为时间节点,届时,无人驾驶汽车将真正驶进现实。” 胡越强预测。
摄像头相关文章:摄像头原理






评论