可使方案一次过的DC/DC开关电源的设计秘籍
根据等式(5)和等式(6),即可得到图7所示的用理想变压器表示非隔离负电压Buck开关电源的CCM小信号模型。
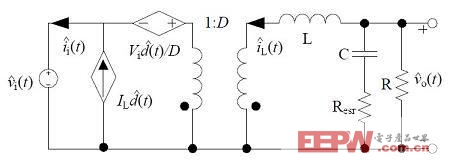
图7 非隔离负电压Buck开关电源CCM小信号模型
2、补偿网络设计
图8为电流连续模式下峰值电流控制(CCMCPM)型非隔离负电压Buck开关电源的系统框图。控制环路包括了电流内环和电压外环两个部分。补偿网络属于电压外环,因此设计补偿网络需要先建立包含电流控制内环的小信号模型。
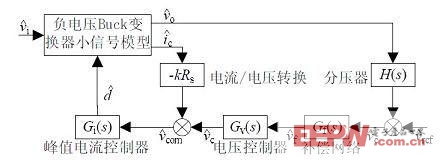
图8 CCM-CPM型非隔离负电压Buck开关电源系统框图
假设系统稳定,且忽略输出电感纹波电压及人工斜坡补偿的影响,则输出电感电流等于控制电流,即:

根据图7所示的非隔离负电压Buck开关电源CCM小信号模型,同时将等式(7)带入化简得,CCM-CPM型非隔离负电压Buck开关电源的动态方程为:
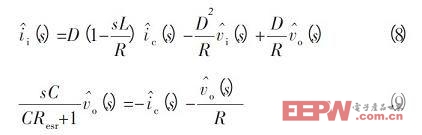
利用等式(8)和等式(9)可以很容易的建立图9所示的CCM-CPM型非隔离负电压Buck开关电源小信号模型。

图9 CCM-PWM型非隔离负电压Buck开关电源小信号模型
考虑到控制电流与控制电压满足:

式中Rs为电流采样电阻;k为采样电流放大系数。将式(10)带入式(9),得控制电压与输出电压的传递函数Ap ( s)为:
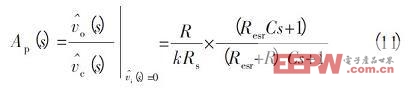
分析可知,控制对象Ap (s)为单极点型控制对象,并且受等效串联电阻的影响,其高频特性差,抑制高频噪声的能力弱。
因此根据图10所示的CCM-CPM型电压外环系统框图,所设计的补偿网络不仅要提高系统的稳态特性和响应速度,而且要增强系统的抗干扰能力。
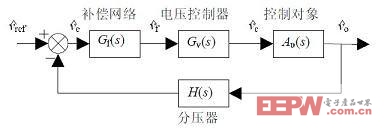
图10 CCM-CPM型电压外环系统框图
图11为实际非隔离负电压DC/DC变换电路补偿网络的硬件电路图。
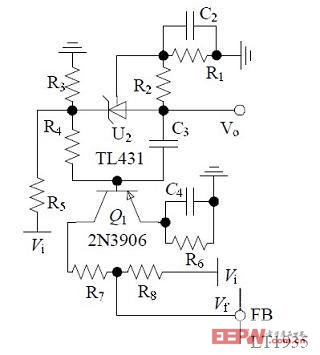
图11 补偿网络硬件电路图
补偿网络的静态放大倍数与电源控制器反馈引脚相对于其参考地的静态工作电压Vf成正比,这里的静态工作电压Vf满足如下关系式:

注意Vf的值应在适中的范围,当取值太大,会降低系统的信噪比。当取值太小,系统的灵敏度和稳态特性都会下降。
补偿网络的动态特性通过电容C2、C3、C4来补偿。其中电容C2引入超前校正,有效的提高了系统的动态稳定性。电容C3则增大了系统的带宽。而电容C4起到了旁路高频噪声的作用。因此通过合理的选择C2、C4、C4的电容值,可以使系统获得较满意的动态补偿效果。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理





评论