DIY机器人:实现多功能探测,提供功能解析,硬件实现,软件流程
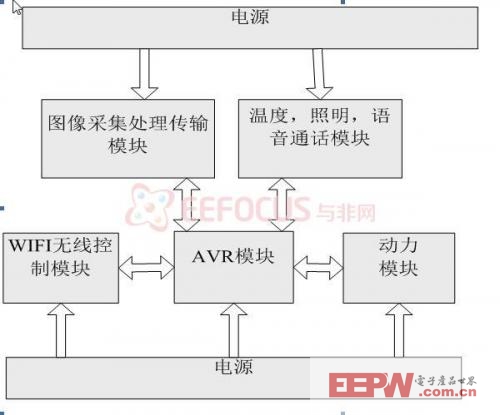
3.2系统硬件结构框图
3.3硬件平台选用及资源配置
所需硬件资源 | 数量 |
PC机 | 1台 |
EVK1100开发板 | 1个 |
TMS320VC5509A图像处理芯片 | 1个 |
OV9650图像采集模块 | 1个 |
锂电池 | 1个 |
5W伺服直流电机 | 9个 |
履带 | 2条 |
WIFI模块 | 1个 |
距离传感器 | 1个 |
LED照明灯 | 1个 |
3.4 系统软件流程
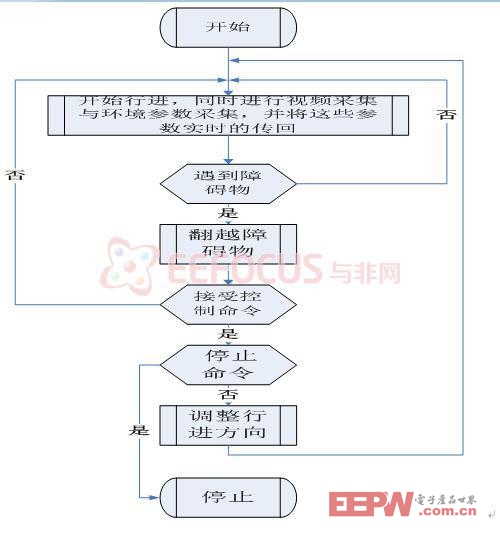
程序运行流程图
3.2系统硬件结构框图
3.3硬件平台选用及资源配置
所需硬件资源 | 数量 |
PC机 | 1台 |
EVK1100开发板 | 1个 |
TMS320VC5509A图像处理芯片 | 1个 |
OV9650图像采集模块 | 1个 |
锂电池 | 1个 |
5W伺服直流电机 | 9个 |
履带 | 2条 |
WIFI模块 | 1个 |
距离传感器 | 1个 |
LED照明灯 | 1个 |
3.4 系统软件流程
程序运行流程图











评论