多传感器状态融合估计在雷达跟踪中的应用
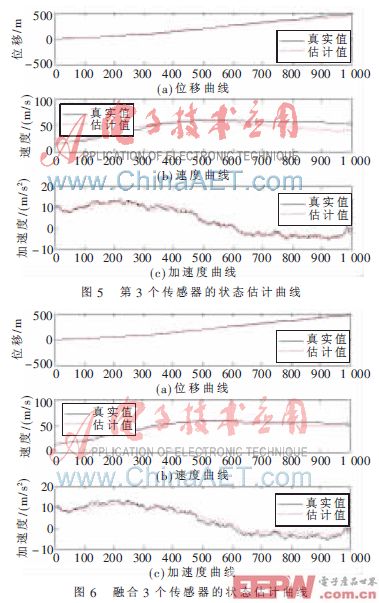
信息融合技术具有提高系统的可靠性和稳定性等优点,状态融合估计是其中研究热点之一。本文将基于Kalman滤波的多传感器状态融合估计方法应用到雷达跟踪系统,仿真实验表明,融合3个传感器的信息所获得的状态估计误差小于利用任何单传感器进行Kalman滤波得出的状态估计误差,因而本方法对雷达系统的跟踪是很有效的。本方法可推广用于组合导航、信号处理、图像处理、故障检测与容错等应用领域。
参考文献
[1] 陈新海.最佳估计理论[M].北京:北京航空学院出版社,1987.
[2] 潘泉,于昕,程咏梅,等.信息融合理论的基本方法与进展[J].自动化学报,2003,29(4):599-615.
[3] YAN L P, LIU B S, ZHOU D H. The modeling and estimation of asynchronous multirate multisensor dynamic systems, Aerospace Science and Technology, 2006,10(1):63-71.
[4] CARLSON N A. Federated square root filter for decentralized parallel processors[J]. IEEE Transactions on Aerospace and Electronic Systems, 1990,26(3):517-525.
[5] SUN S L. Multi-sensor optimal information fusion Kalman filters with applications[J]. Aerospace Science and Technology, 2004,8(1):57-62.





评论