多传感器状态融合估计在雷达跟踪中的应用
3 雷达跟踪系统仿真
考虑具有3个传感器的雷达跟踪常加速度模型[5],其离散状态方程为:
设传感器的采样点数为600,则10次Monte Carlo仿真的统计结果如表1所示。表1给出了估计误差绝对值均值比较,3个传感器融合的综合估计误差是最小的。

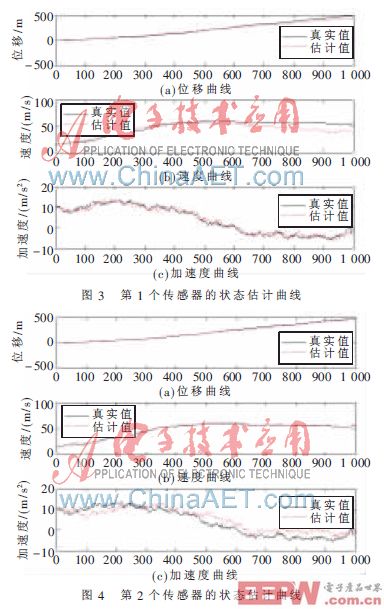
第1个传感器、第2个传感器、第3个传感器及3个传感器融合的状态估计曲线分别如图3、图4、图5、图6所示。图中横轴为仿真步数,每步时间为0.01 s。若仔细观察这些状态估计曲线,则单传感器状态估计曲线均有不足,如图3对速度跟踪不是很好,图4对加速度跟踪不是很好,图5对速度跟踪也不是很好,只有图6对位移、速度及加速度跟踪均较好。由此可见,与单传感器Kalman滤波的结果相比,3个传感器融合所获得的估计值都更加贴近于目标信号,从而证明了本文算法的有效性。





评论