基于MSP430的水声遥控发射系统设计
3 D类功放电路
本文引用地址:http://www.eepw.com.cn/article/247321.htm由MSP430F169直接产生的信号的功率很小,信号需要经功率放大后发出去,以保证能够传输足够远的距离,这就离不开功率放大器。
功放电路设计采用LM353对信号经行放大和反相,通过比较器LF395进行信号进行比较产生方波驱动功放管,同时对导通时间进行控制,避免了两只功率管同时导通烧毁电路的情况出现。对于功率的放大选用VMOS管IRFP250来完成,用变压器完成功率的合成及电路匹配。
4 系统的软件实现
4.1 编码设计
海洋中存在的众多不定因素使水声信道变得异常复杂。随机起伏的海面与地况不明的海底;海水中存在的大量的鱼群、浮游生物、气泡层、涡流、层流、不同温度的水团;随着温度、盐度、深度等不断变化的声波传播速度;各种风雨、波浪、生物与传播噪声等均对声波在海水中的传播有巨大影响,因此,对于水下声信号的传播的研究面临巨大的困难。
水声遥控信号在水中传播,受到水声信道特性的影响,会产生一定的干扰,甚至会出现信号畸变,为了解决这一问题,接合水声信道的特性,常用的两种非相干的信号调制方式频移键控(FSK)、多进制数字频率调制(MFSK)。MFSK是FSK的多进制调制方式,与FSK相比它有较高的传信率,适用于高速传输的系统,但是其信道利用率降低。本次设计采用MFSK调制方式进行编码,但是为了降低干扰,抵抗水声信道的多途效应,在信号之间添加了一定的码元保护时间,很方便有效地解决了这一问题。
对于本次设计,要求系统工作频率为25~35 kHz,脉冲宽度为1 ms,脉冲间隔为100 ms,在工作频率范围内选择3个不同的频率进行编码。
编码规则如下:
1)选用3个频率的正弦波信号f1=26 kHz,f2=30 kHz,f3=34 kHz,一种频率在一个指令码中只出现一次,以便于多种情况下准确识别码元的填充频率,降低误码率,通过不同频率的码元的顺序来分辨不同的信号;
2)单个码元持续时间为1ms,码元间隔为100 ms;
3)对于3个频率的编码信号,每次只要发射两个填充不同频率的码元即完成信号的识别。
遥控分系统的工作频率分别为:f1=26 kHz,f2=30 kHz,f3=34 kHz
当航模的运动速度为v时,接收到的信号的多普勒频移最大为:
当航模的运动速度为5 m/s是,多普勒频移为0.23 kHz,远小于这4个频率的最小间隔(4 kHz),不影响遥控数据的解码。
通过单片机MSP430F169内部的DMA和D/A来产生不同频率的正弦波信号。对于本次设计系统要求的三种不同频率的信号,需要分别对它们进行采样,采样的点数需要根据系统时钟频率及DMA控制器像DAC12传输数据的速率来决定。对于数据的采样,可在码元持续时间内对所有周期进行采样,DMA控制器可以按照一定的频率连续不断地将这些采样数据传输到DAC12模块,经DAC12转换输出对应的正弦波形。DMA控制器传输数据不需要CPU的参与,CPU可独立于各种低功耗模式。但是需要注意,DMA控制器的传输速度要比DAC12处理数据的速度快,所以当使用DMA控制器的时候,应避免DMA控制器和DAC12操作不一致。
4.2 键盘扫描及数码管显示
设计选用的按键通过机械触点的闭合与断开来控制输入点信号的产生。由于机械触点的弹性作用使得它在断开或闭合的瞬间会产生抖动,进而使产生的电压波形如图4所示。

为了保证系统对一次按键按下只作一次处理,需要采取措施消除抖动的影响。对于这个问题,一般采用软件方法去抖动,在编程过程中,当判断有键按下时加入一定时间的延时子程序,然后再次确定按键是否被按下。如果再次确认的结果仍然处于被按下的状态,则再做该键按下的相应处理,这样就可以避开抖动的时间段,消除抖动影响。
对于数码管静态显示,数码管每一位的字选线与一个8位端口相连,只要在该位的字选线上出现字形码,就可以显示出相应的字符。一般显示程序并不直接将段码赋值给对应端口,而是建立一张段码表,显示时以所要显示的数字为索引查询这张表格。
4.3 系统编程
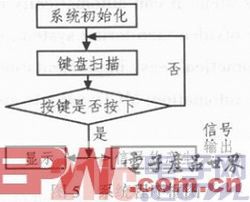
对于本系统来说,其程序框图如图5所示,根据框图完成系统编程。通过对键盘进行扫描,来判断是否有按键按下以及按下的按键是第几个,如果按键按下,根据所按的按键来输出相应的信号并进行显示。不同频率的信号其采样点不同,对于26kHz、30 kHz、34 kHz的信号,它们的采样点分别为一周期内22个、20个、19个,当有按键按下时,DMA向DAC12传输相应的采样数据,产生所要求的信号。此外,在系统初始化时要开启8 MHz晶振。
5 系统调试
系统要求两个填充不同频率的脉冲之间的间隔为100 ms,脉冲宽度为1ms。将编写的程序编译下载到MSP430F169,给系统上电,MSP430F 169输出端的波形如图6(a)所示,不同的遥控信号在示波器中的显示情况是一样的,再次不一一列举。图中示波器时间单位为50 ms,两脉冲间隔为100μs,满足设计要求。图6(b)、(c)、(d)所示为MSP430F169产生的不同频率的脉冲信号。图中示波器的时间单位为200μs,脉冲信号的脉宽为1 ms,满足设计要求。
6 结论
该设计主要从MFSK编码的基本原理入手,选用比较常用的MSP430F169微功耗单片机作为处理器,进行水声遥控发射系统的理论研究及软硬件实现。电路经调试编程后可以准确的完成不同信号的产生、选择及显示。在水池实验里,对相应的接收设备进行控制,操作简单,误码率小,达到了预期目标。

pa相关文章:pa是什么
负离子发生器相关文章:负离子发生器原理 晶振相关文章:晶振原理 脉宽调制相关文章:脉宽调制原理 离子色谱仪相关文章:离子色谱仪原理









评论