一种基于PIC16F877A的无刷直流电机控制器设计
采用在三三导通方式时,每个时刻都有不同桥臂的3个功率器件导通,相邻两次换相的电角度为600,功率器件导通的电角度为1 800。如果认定流入绕组的电流产生的力矩方向为正Ta,则流出(另一个绕组)电流产生的力矩方向为负Ta,则它们的合成力矩为1.5Ta,如图2(b)所示。
本文引用地址:http://www.eepw.com.cn/article/246385.htm从上面的分析可以看出,对于三相Y接高压断路器无刷直流电机,为了获得较大的输出力矩,主回路通电方式采用两两导通方式更适合。
2 系统的硬件设计
2.1 硬件的结构
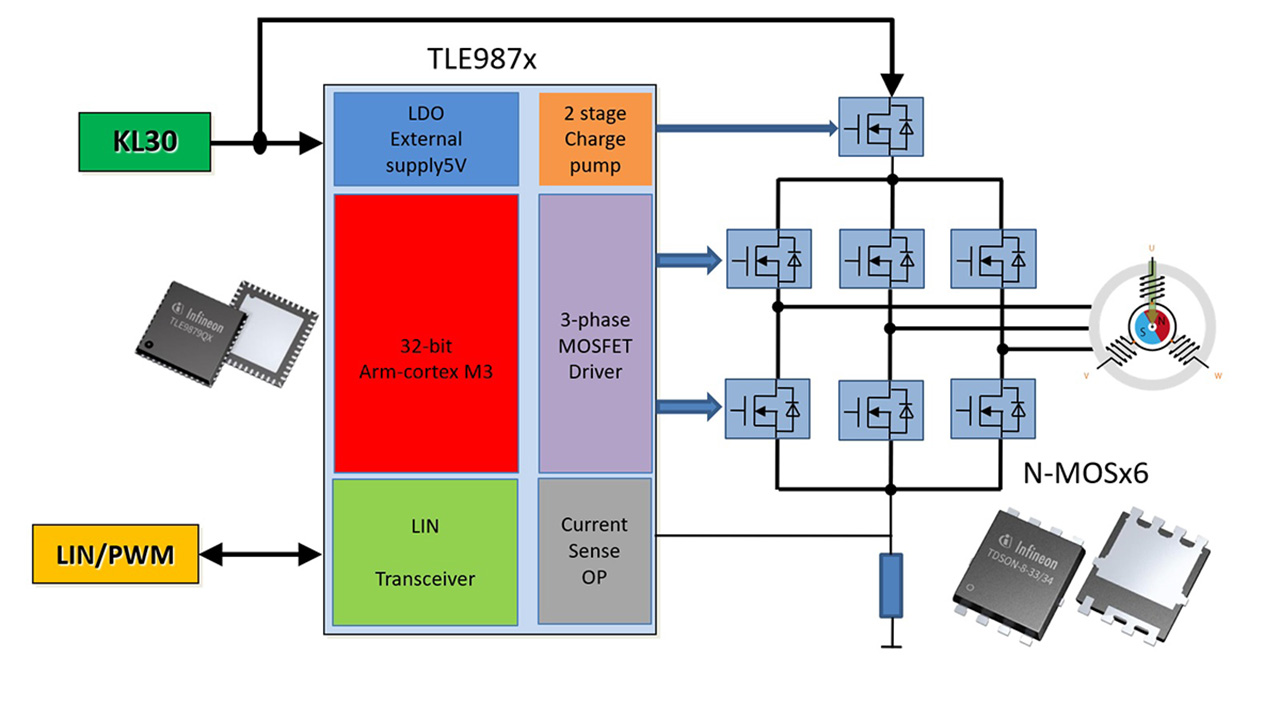
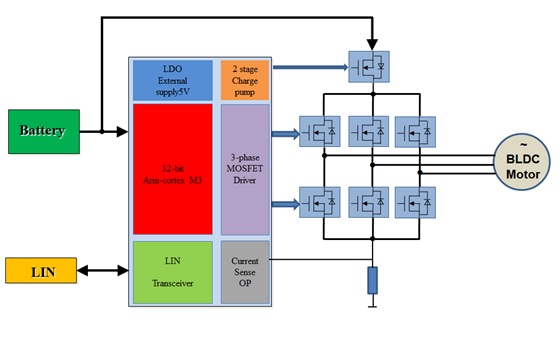
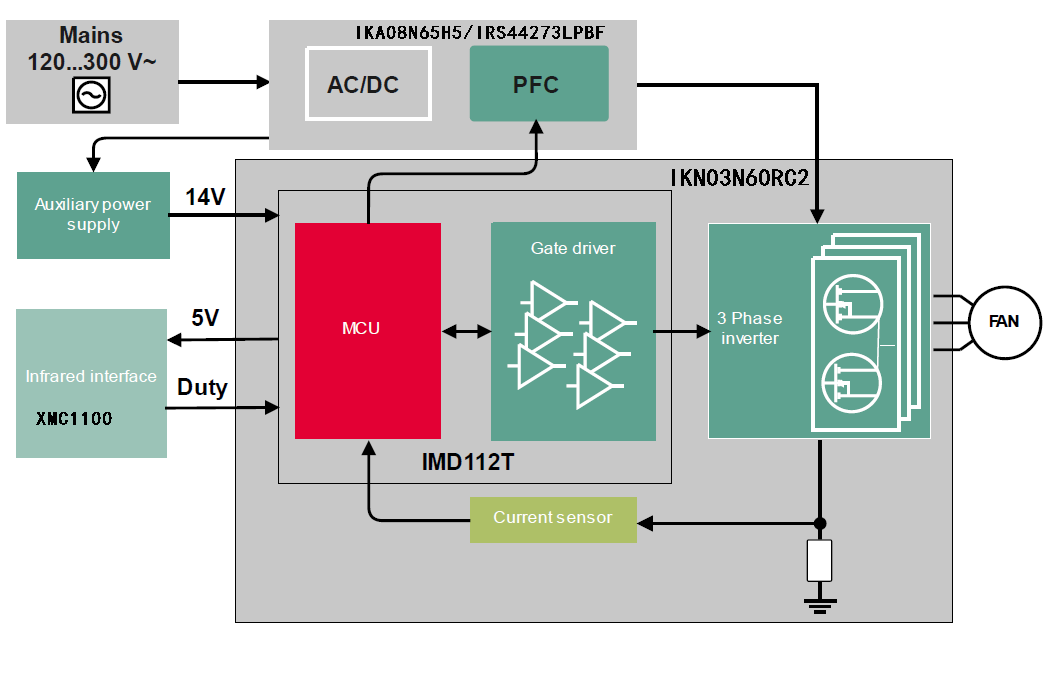
基于PIC16F877A的无刷直流电机控制系统硬件框图如图3所示,控制系统分为单片机最小系统、控制电路和控制对象三部分,其中单片机最小系统是指以PIC16F877A为核心包括电源模块、晶振复位模块和外部扩展模块,控制电路包括光耦隔离电路、驱动逆变电路、电流检测电路、转子位置检测和驱动保护电路,控制对象为永磁无刷直流电动机。PIC单片机最小系统为单片机提供工作所需的电源、时钟信号、复位信号、和存储器扩展。控制电路控制电动机绕组在合适的位置换相、驱动电动机持续运行,同时检测系统参数,保证系统可靠稳定运行。

2.2 转子位置检测电路设计
霍尔传感器的工作原理是半导体器件的霍尔效应,是无刷直流电机换相控制中应用较多的位置传感器。根据霍尔元件的特性不同分为线性霍尔元件和开关型霍尔元件,线性霍尔元件输出时一个和磁场成正比的连续信号,常用于连续量如位移等的测量,开关型霍尔元件的输出时一个根据磁场强弱而变化的高低电平信号,常用作无刷直流电机的位置传感器。根据控制系统实时性要求及安装方便,本控制器采用锁存型霍尔元件作为电机转子位置传感器。
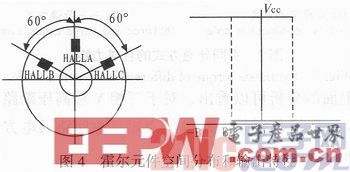
根据电机内部电磁场分布,将3个霍尔传感器安装在霍尔盘上,相邻两个之间的夹角为60°。由于在电机内部不易安装霍尔盘及拆卸不方便,故将其安装在电机的外部,制作一个圆形磁钢模拟电机内部电磁场分布,霍尔元件的空间分布和输出特性如图4所示。当控制系统工作时,霍尔元件根据磁钢的位置输出高低电平,主控制芯片根据高低电平信号判断电机转子位置,调用内部程序输出正确的驱动信号,使电机开始动作。随之电机转角的变化,霍尔元件的输出也发生变化,主控芯片根据霍尔元件的高低电平来确定IGBT的导通顺序,使电机持续旋转。
2.3 IGBT驱动保护电路设计
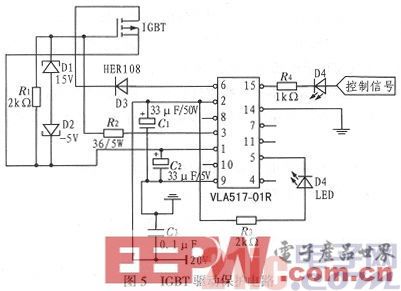
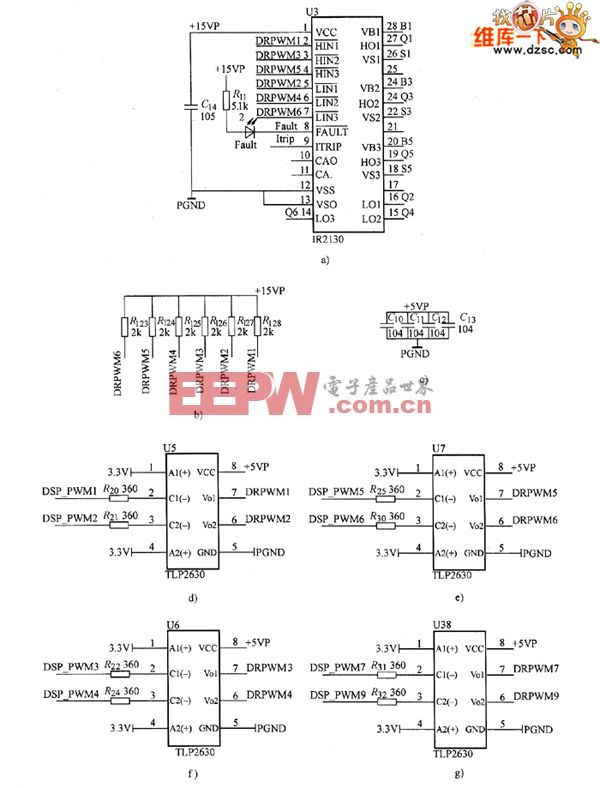
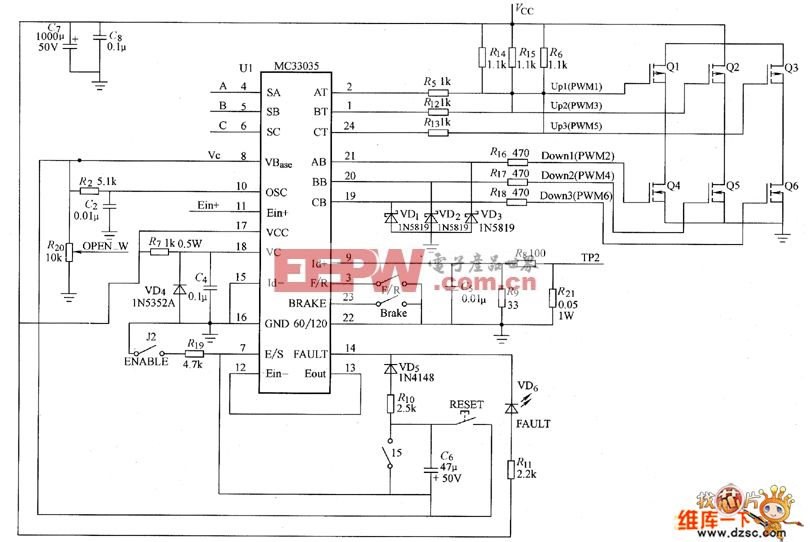
根据系统需求,设计IGBT隔离驱动电路是功率驱动电路的关键。VLA517—01R是替代EXB841的快速型IGBT集成驱动芯片,整个电路延迟时间不超过1μs,最高工作频率达40~50 kHz,只需外部一个20 V电源供电,内部可产生一个正驱动电压及反向截止电压,模块内部含有过流保护和故障信号输出电路。EXB841输入端15和14管脚有10 mA的电流流过时,内部光耦导通,3脚输出驱动电压使IGBT导通,驱动信号截止,光耦截止,3脚输出反向电压使IGBT截止。本文所设计的IGBT驱动保护电路如图5所示。
3 软件设计
PIC单片机仿真器提供存储器和时钟,并能运行代码,即使没有与目标应用板相连。在开发和调试期间,ICE提供了最强大的能力来发挥系统的所有功能,这样允许用户对应用方便地进行测试、调试和再编程。控制器硬件电路设计完成以后,接下来是软件编制工作。在软件设计过程中,一般首先根据实际情况理清程序的运行过程,在结合硬件电路的特点设计出软件的流程图。在具体程序设计中,一般先把要用到的中断进行定义和把变量定义到RAM中等,然后定义各个子函数,再编写各个子函数,最后进行调试。
软件程序是系统的灵魂,本文所设计的控制系统软件程序由系统主程序、中断服务子程序、速度检测子程序和故障保护子程序组成。主程序中设定了系统的中断信号由PIC单片机的事件管理器T2定时器的周期中断来触发,当T2周期匹配时,调用中断服务子程序,通过速度检测子程序将检测量作为反馈值与设定的速度值比较,调节PWM的占空比,实现电机速度的调节。故障保护子程序检测系统的电压、电流和温度,与给定安全值进行比较,当发成故障时,发出错误警报并封锁控制信号输出,实现对控制系统的保护主程序、中断服务子程序和故障保护子程序如图6~8所示。


4 控制系统与电机试验
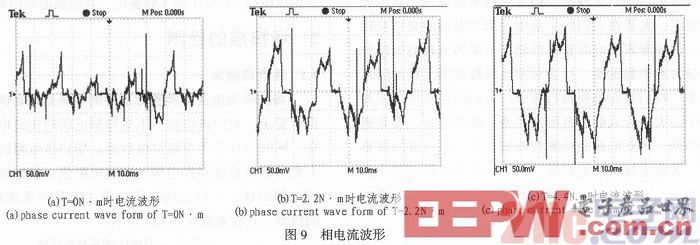
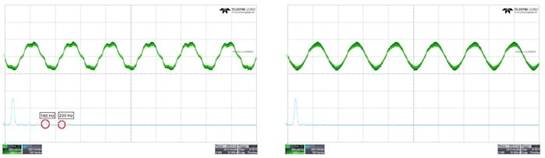
将设计好的系统与电机联机实验,电机的额定功率为900 W,额定电压为150 V,额定负载为4.31 N·m。通过示波器TDS1012观察发现实际运行状态下的霍尔反馈信号和理论分析结果完全一致,控制器的三路霍尔位置信号为空间上相差1200电角度的矩形波。实验过程分别测量负载转矩为0N·m、2.2 N·m和4.4 N·m时电机电流,如图9所示。从图可知:电机的电流曲线近似于正玄波,本文所设计的控制系统能够在不同负载情况下驱动无刷直流电动机动作,系统可靠性强、稳定性能好。
5 结论
文中以PIC16F877A单片机为核心设计了无刷直流电动机控制系统,包括PIC16F877A最小系统、转子位置检测电路、IGBT驱动保护电路和系统信息反馈电路等,并编写控制系统软件流程。通过试验验证本文所设计的控制系统能够可靠驱动无刷直流电机可靠运行。
风力发电机相关文章:风力发电机原理 汽车防盗机相关文章:汽车防盗机原理







评论