基于ARM的红外光汽车速度管理系统研究
2.2 信号接收与定时器工作
如图3 所示,在没有车辆经过光控测速区时,M’、N’两点一直能接收到38KHz 的调制红外光,均输出高电平,暂稳态电路均处在稳态。门G 的输出为逻辑1,UL 始终为高电平。当有车辆通过光控测速区时,M 点发出的光线首先被阻断,UM 由高电平先变为低电平,暂稳态电路1 被触发而进入暂稳态,如图4 中的t1 时刻之后所示。此时,UM’为低电平,G 门触发,输出UL 为低电平。ARM 系统的CAP1.0 捕获到UL 由高电平变低电平,发生下降沿捕获,自动装载T1TC 的值传输到捕获寄存器T1CR,并产生中断,进入中断服务子程序,读取T1CR 的值而保存。

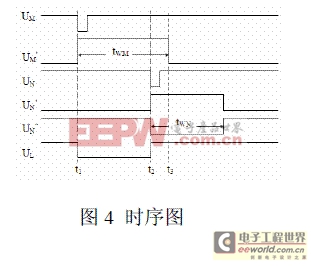
随后,当汽车达到N 点时——即在t2 时刻,暂稳态电路2 被触发,UN’变为高电平,经过非门变为低电平UN’’。此时G 门输出由低电平变为高电平,ARM 的CAP1.0 捕获到UL由低电平变高电平,发生上升沿捕获,自动装载T1TC 的值到捕获寄存器T1CR,并产生中断,进入中断服务子程序。计算两次捕获寄存器T1CR 的差值N 及计数器的工作频率f,得到车辆通过两测试点M 点和N 点的时间差t2-t1。
2.3 ARM 核心板及触摸显示系统










评论