墨尼黑理工开发高精度车距测量技术
慕尼黑理工大学近日基于先进驾驶辅助系统,并结合协作转换器(cooperative transponder)开发出一种精确测量车距的方法。
新的测距方案即便在车载摄像头的视野被挡住时也能够起作用。
在系统运行过程中,行人与骑车者的手机将作为转换应答器。车载定位系统计算这些“应答器”的移动轨迹,系统在检测到“应答器”处于车辆前方时,将有驾驶辅助系统的相关功能对车辆进行紧急制动。

车载单元发送距离信息→携带“应答器”的道路使用者作为接收端→应答器解析车载单元的代码并回馈→车载单元计算车距→最终发出警告或自动制动
该科研项目为慕尼黑理工大学Ko-TAG项目中的一部分,项目负责人Erwin Biebl教授指出,系统目前的水平是能够在几微秒内实现精确到厘米的定位。装载与车内的定位系统将会持续地向应答器发送特殊代码。而应答器在接受到这一信息后修正代码序列并以更精确的时序模式作出反馈。
向司机发出警告、汽车系统自动制动等行为必须在行人或骑车者到达车辆前方之前就执行。同时,系统必须保证发出假警报的概率极低。研究人员表示,目前这项系统能够将时间误差控制在几皮秒(十亿分之一秒)之内,在根据车速换算误差距离误差,则仅为几厘米。
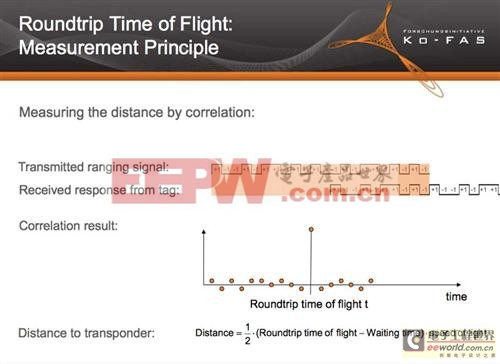
测距技术原理图及计算公式
研究者还指出,应答器有两种形式,一种是以智能手机为载体,另一种则是独立的微型装置,可以集成在人们的衣服上或包里。但考虑到现在几乎人人都有手机,因此第一种方法则更为实用。根据慕尼黑理工大学透露,目前已经有一家大型手机制造商愿意与这项系统合作。
除了慕尼黑理工大学外,还有多家机构参与了该项目,例如大陆国际安全工程(Continental Safety Engineering International GmbH)、戴姆勒集团(Daimler AG)等等。








评论