dsPIC3F3013的CAN总线数据采集系统
CAN总线接口电路如图3所示。

CAN协议控制器采用Microchip公司生产的MCP2515。MCP2515是带有SPI接口的独立CAN控制器,它完全支持CAN V2.0B技术规范,通信速率为1 Mb/s,包括2个接收缓冲器、6个29位验收滤波寄存器、2个29位验收屏蔽寄存器、3个具有优先级设定及发送中止的发送缓冲器、高速SPI接口(10 MHz)。
MCP2515与MCU的接口可以灵活配置。可通过引脚(如TXORTS)与MCU的数字I/O脚直接相连,利用数字I/O的读写功能控制MCP2515 的状态;也可以直接使用MCP2515的SPI指令集来实现所有的功能。用于控制MCP2515的SPI指令集如表1所列。

dsPIC30F3013通过SPI接口与MCP2515进行通信,dsPIC30F3013的SPI模块工作在主控模式,MCP2515工作在从动模式。dsPIC30F3013通过调用SPI指令来访问MCP2515的内部寄存器。
MCP2551是一个可容错的高速CAN收发器,它完全符合ISO-11898标准,包括能满足24 V电压要求。它的工作速率可高达1 Mb/s。
2 软件设计
dsPIC30F3013作为控制核心,它承担着数据采集处理和CAN通信的任务。数据采集部分的工作流程如图4所示。
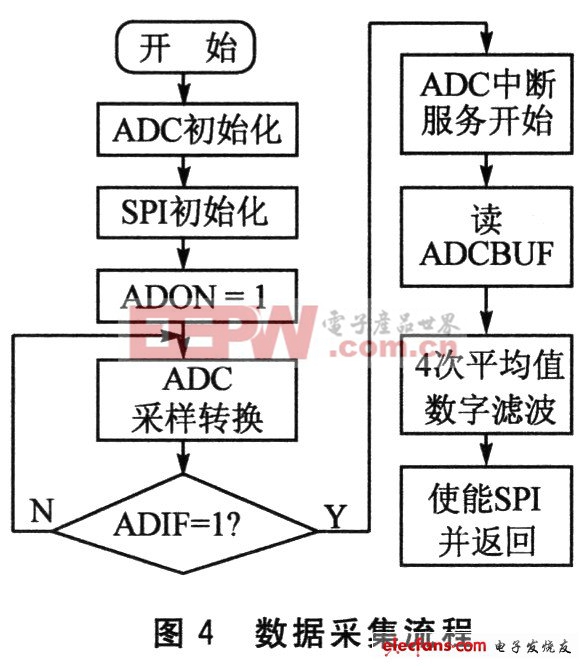
dsPIC30F3013的12位ADC模块包含一块ADCBUFO至ADCBUFF的16字双口只读缓冲区,对ADC转换结果进行缓冲。本应用采样3路信号,并用扫描输入,经过12次ADC转换后,每次转换的数据依次写入ADCBUF0至ADCBUFB。即代号为0、3、6、9的AD-CBUF中存放的是同一个信号的不同时间的采样值,将这4个缓冲器的结果相加,然后再右移2位,即可实现该信号的4次平均值数字滤波。其他两个信号存放在与之相关的 ADCBUF中,处理方法与此相同。
MCP2515的SPI接口支持0,0和1,1运行模式。外部数据和命令通过SI引脚传送到器件中,且数据在SCK时钟信号的上升沿传送进去,在SCK的下降沿通过SO引脚传送出去。CS片选引脚设置为低电平后,MCP2515希望收到的第一个字节是指令/命令字节,这就要求在调用一个命令时,要先把CS 引脚拉升为高电平然后再降低为低电平。使用装载TX缓冲器指令,取消了一般写命令所需的8位地址,只需选择地址指针设置的6个地址之一,便可快速地将数据写入发送缓冲器。
下面以MCP2515的装载TX缓冲器为例来说明数据的发送过程。装载TX缓冲器的时序如图5所示。本应用有3路信号,每一路信号都要求精确到小数点后2 位,所以经过处理后的数据格式使用浮点型。一个浮点数需要占用4字节,为了使监控中心易于管理,用包含4字节数据长度的标准数据帧来发送数据。现以装载 TX缓冲器0为例说明一次数据发送操作,如图6所示。

dsPIC30F3013的SPI模块在数据发送和接收时有8位和16位两种工作模式可选。MCP2515的SPI指令、内部寄存器地址及数据都是8位的,所以在初始化SPI模块时,清零MODE16(SPI1CON10>),将通信数据配置为8位宽度。
结 语
本文介绍了一种以Microchip公司dsPIC30F3013为控制核心,以MCP2515为CAN控制器和以MCP2551作为CAN收发器的数据采集系统。该系统与传感器组成一个CAN节点,有效地改善了工控系统中监控部分线路布局范围广、布线凌乱、抗干扰能力差的现状,同时,使整个监控系统更易于扩展。实践证明,这种设计是可靠的、高性能的。








评论