磁导航智能车路径信息采集系统的设计与实现
磁导航技术在智能交通领域中是一项非常有前景的技术,以国家智能交通系统工程技术研究中心(ITSC)的研究成果为例,其采用磁性参考/感知原理,即以车道中心线上布设的离散磁道钉为车道参考标记,通过车载磁传感器探测到磁信号而产生感应电压,来判断车辆当前的位置情况。这是采用永磁体作为参照物的实例[1-2]。
鉴于磁导航技术具有的实用价值,飞思卡尔杯全国大学生智能汽车竞赛在原有的光电组与摄像头组的比赛项目上,于2010年新增了通过感应赛道中心导线产生的交变磁场进行路径检测的电磁组。
根据电磁组的路径信息采集原理,可以得出磁场传感器的基本设计方法和路径信息提取算法的基本要求。对于电磁组赛车,交变磁场分布范围广泛,传感器得到的数据是一系列有分布规律的离散点。可以根据离散点的轮廓、实际经验和误差要求选择一条曲线来近似逼近磁场在传感器处的分布情况。另外根据竞赛规则,处理器必须采用飞思卡尔公司的HCS12系列单片机,由于其数据处理能力不足,必须选用一种数据处理量较小的算法来实现离散点的曲线拟合,以保证控制的实时性。
以设计合理的路径信息采集系统来对车体位置进行准确判断,同时选用一种路径信息采集算法从传感器信号中准确提取出赛道信息是本文研究的重点。
1 磁导航智能车系统
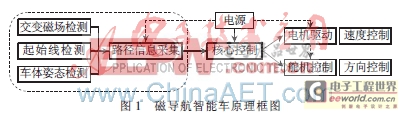
磁导航智能车通过感应外界电磁环境对路径信息进行准确判断,从而通过舵机和电机对车体方向和速度进行控制,达到自主寻迹的目的。系统主要分为核心控制模块、路径信息采集模块、电机驱动模块和电源模块,其原理框图如图1所示。
本系统的磁场环境为埋设在跑道中通用的20 kHz、100 mA交变电流的导线产生的交变磁场。利用交变磁场进行磁导航的技术在国内应用的实例较少,其中清华大学根据竞赛规则设计了一种电磁组赛车,该赛车使用两个传感器采集车体两边的磁场信号,以控制小车的走向。该设计方案是用运放、三极管等一些基本电子元件对车体进行粗略控制。如果采用更多的传感器、更精确的信号处理方法和单片机,再配合一定的算法则可以对道路的形状进行准确判断、优化控制策略和改善控制效果。
2 路径信息采集系统的硬件设计
路径信息采集系统通过对路径的检测来获取路径信息,从而对车体的方向和速度进行精确控制。该系统主要包括交变磁场检测、起始线检测和车体姿态检测三个部分,其原理如图1中虚线框所示。
2.1 交变磁场检测
交变磁场检测主要是对特定的交变磁场环境进行检测。本文选用LC选频振荡电路检测交变磁场,然后通过放大电路的放大和检波电路的检波处理,得到与振荡信号峰峰值成正比的直流电平,以便于A/D转换。其原理框图如图2所示。

(1)选频部分
采用LC振荡电路的原理进行设计。根据LC振荡电路谐振频率计算公式和市场上电感电容型号,选用一定量值的电感和电容。电感选型时要注意其Q值和内阻,Q值会影响其谐振增益和交变磁场的检测。
(2)放大部分
信号的放大有多种方法:基本放大电路、带电压偏置的放大电路、运算放大电路等。对于基本放大电路信号,其静态工作点易受温度变化的影响,输出信号可能会出现失真[5]。这就需要带电压偏置的放大电路,偏置电路给三极管提供合适的工作点,保证三极管在放大交流信号时工作在放大区,同时能够保证静态工作点的稳定,使工作点少受或基本上不受环境温度的影响。但是由于带电压偏置的放大电路的三极管静态工作点的调节较为繁琐,且在多路信号需放大的情况下电路设计较为复杂。因此,从对信号进行精确放大的角度考虑,本文选用仪表用差动放大电路对信号进行放大处理。其电路原理图如图3所示。

该放大电路输出电压与输入电压的关系如下:
采用这种由三运放组成的仪表用差动放大电路可以提高输入电阻,提高共模抑制比,运放U1A、U2A性能相近,简化了温度补偿电路。该放大电路具有低失调电压、低漂移、低输入偏置电流、高共模抑制比等特点[6]。
(3)检波部分
检波部分选用倍压整流检波电路的设计方案。该电路可以获得正比于交流电压信号峰峰值的直流信号,便于A/D转换。
2.2 起始线检测
根据竞赛规则,起始线处放置永磁体作为标志。起始线检测即是对永磁体检测。本文采用霍尔元件方案,当垂直方向上穿过霍尔元件的磁场强度方向改变时,霍尔元件的输出端将产生电平跳变,通过检测该电平跳变来检测起始线。
2.3 车体姿态检测
对于车体姿态检测,本文采用Freescale公司量程为±1.5 g的低重力加速度传感器MMA7361L,用于测量车体相对于水平面的倾斜程度。
MMA7361L是一款低功耗、低重力三轴加速度传感器,具有信号调理、稳定补偿等功能[7]。将其固定在车身上可以实时检测车体相对于地面的倾斜角度,主要用在车辆上坡和下坡的判断。[next]
本设计将7个传感器水平并排放置,距地面高度约为5 cm。假设线圈在水平方向上与导线距离为r,线圈高度为h,如图4所示。
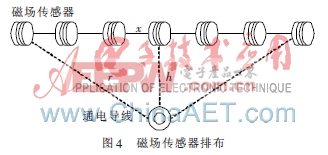
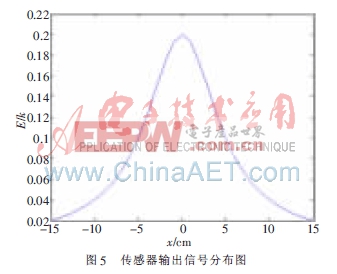
根据安培环路定理,距导线r处的磁感应强度反比于距离r。而线圈的轴线是水平的,感应电动势反映了磁场的水平分量,因此感应电动势:
路径信息的采集首先要确保传感器输出信号的准确性,准确性的确保应从相同条件下各个传感器输出信号的数值差异和信号数值分布两个方面来判断。本文在软件上主要采用归一化算法和曲线拟合算法来确保路径信息采集的准确性。
3.1 归一化算法
该算法是将所有传感器输出信号变换为无量纲的量,屏蔽各传感器在硬件和物理特性上的差异。具体算法流程是:首先测量每个传感器输出信号的最大值(Max1、Max2、Max3、Max4、Max5、Max6、Max7)作为基准量,在赛车运行过程中,将7个传感器采集到的数据分别除以7个基准量,即可得到传感器归一化后的数值,该数值可用于赛道类型判断。
3.2 曲线拟合算法
从控制的需要,只需提取出导线所处的位置,也就是图像中峰值点的横坐标。因此只要拟合出一条曲线,使该曲线峰值点横坐标尽可能地逼近导线所处位置的横坐标即可。本文采用最小二乘法进行曲线拟合。
取7组数据中最大的前5组数据进行二次曲线拟合,得到二次曲线方程为: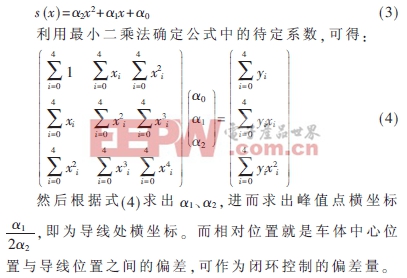
采用最小二乘法对数据进行二次曲线拟合有如下优点:
(1)可以满足智能车控制的实时性需要。进行二次曲线拟合的计算量相比于其他曲线拟合方法较小,同时二次曲线拟合的公式可以事先求得,大大减少了运算量。
(2)对导线位置判断较为准确。虽然传感器信号的实际分布情况不是二次函数的形式,但是通过二次曲线拟合后得到的峰值点横坐标与实际峰值点横坐标接近。因此通过该算法可准确地提取出导线的位置。
4 路径信息采集系统的测试结果与分析
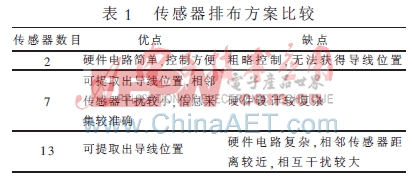
本文采用如图4所示的7个传感器一字型排列的方案,测试过程中同时对2个传感器和13个传感器一字排布的方案进行了测试,并对三种排布方案进行了优缺点的分析,其结果如表1所示。综合考虑后,选用7个传感器的方案最合适。[next]
小车运行过程中,使用基于NRF24L01的无线模块和基于LabVIEW的上位机对设计方案进行在线调试。首先根据归一化算法,测得各传感器输出信号的最大值,即各传感器放置在导线正上方一定高度时的输出量作为基准量,各传感器的输出信号除以基准量作为归一化后的数据进行曲线拟合。为方便运算,本文将归一化后的数据乘以126作为最终数据。表2为赛车运行到某一弯道处时,各传感器输出量与归一化后的数据量之间的关系,同时设定各个传感器的横坐标。通过上位机观测到的各传感器输出量如图6所示,各传感器输出量归一化后的数据量如图7所示。利用最小二乘法求得峰值点坐标值为1.516(保留小数点后三位小数)。
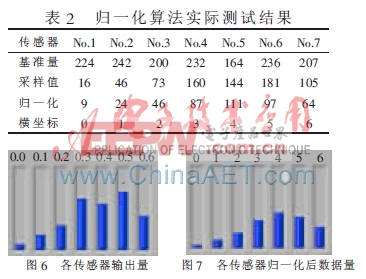
未处理之前,各传感器分布并无一定规律,而归一化处理后,各传感器数据按一定规律分布。曲线拟合算法可以准确提取出峰值点横坐标,这样智能车方向闭环控制中的位置反馈由一系列离散量变成连续量,反馈信息更加精确。
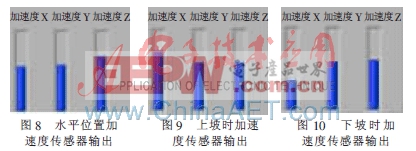
对于车体姿态的检测,车体在水平位置、上坡和下坡时加速度传感器输出信号分别如图8、图9、图10所示。根据本文中加速度传感器的放置位置,车体的前后倾斜程度影响传感器X方向的输出量,因此检测加速度传感器X方向上的输出量变化即可判断车体当前倾斜程度,进而改变控制策略。
本文介绍了磁导航智能车路径信息采集系统的设计方案,从硬件和软件的角度对设计过程进行了较为详细的阐述。硬件上,采用仪表用差动放大电路对采集到的较弱的信号进行精确放大处理,采用加速度传感器对车体姿态做出判断;软件上,采用归一化算法和曲线拟合算法对传感器采集到的信号进行进一步处理,从而提取出车体当前的准确位置。测试结果证明,本方案是可行有效的。但该设计方案还有一些可以改进之处,例如在对传感器布局时,可以将电感线圈按照两两垂直的方向排列,这样可以分别求得某一点处三个方向上的磁场分量;在软件的算法上也可以引入对赛道类型的预判策略。这些都是进一步研究的方向。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
倍压整流电路相关文章:倍压整流电路原理
电流变送器相关文章:电流变送器原理 lc振荡电路相关文章:lc振荡电路原理






评论