最小正弦PWM的直流无刷电机控制方案
采用开关损耗最小正弦PWM控制BLDC时,电机端线电压与霍尔传感器输出之间的关系示意图如图6。
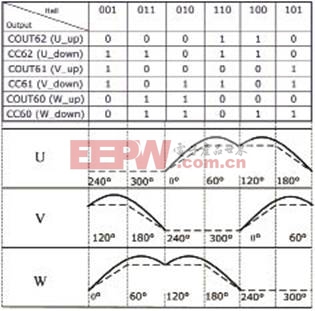
图6 采用开关损耗最小正弦PWM时,端线电压与霍尔状态的关系
由图2可知,采用开关损耗最小正弦PWM时电机端线电压超前于相电压30°,因此可得采用正弦波控制时电机相电压与反电势同步。
由于相电压超前于相电流,因此相电流滞后于反电势。
转速计算
转速计算依赖于霍尔传感器,理想状态下相邻两个霍尔状态的间隔为60°,实际应用中由于存在安装误差,实际间隔并非60°,会引入计算误差。本文档中采用一个霍尔传感器的输出作为转速计算参考,如图7所示。其中高低电平分别为180度,不会引入安装误差。利用此信息即可计算电机转速。
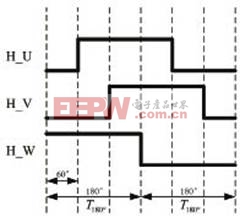
图7 转速计算
计算公式如下:![]() 。其中:f为电频率,P为电机极对数
。其中:f为电频率,P为电机极对数
角度估算
与方波控制不同,正弦波控制中角度为连续变化,而BLDC中常见的3个霍尔传感器仅仅能提供6个角度信息,即0°,60°,120°,180°,240°,300°,其他角度信息无法直接获得。通常采用平均速度法,假设在一定时间内电机速度平稳,利用前次霍尔换相时的角度与速度信息插值得到其他角度信息,如图8所示。
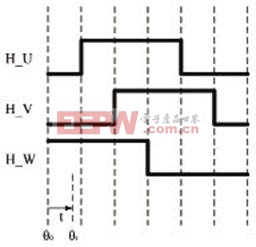
图8 角度估算![]() ,由此可见电机的转速波动将直接影响角度计算的误差,在方案中利用相邻3次180°换相时间的平均值来计算转速信息,如图9。
,由此可见电机的转速波动将直接影响角度计算的误差,在方案中利用相邻3次180°换相时间的平均值来计算转速信息,如图9。
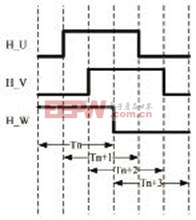
图9 多次平均法计算转速

pwm相关文章:pwm原理



评论