永磁同步调速系统自整定PI速度控制器设计
3 仿真和实验结果
3.1 仿真结果
通过Simulink进行仿真,可得到用增益整定PI速度控制器、PI电流控制器控制的PMSM双闭环控制系统的控制效果。电机参数:Rs=2.8 75 Ω,Ld=Lq=8.5 mH,ψ=0.175 Wb,J=0.093 kg·m2,np=4。增益整定PI速度控制器的参数:Kpmax=0.15,Kpmin=0.12,a=1,Kimax =0.009,η=5,ε=0.002。当速度给定为变化的值时,速度响应曲线如图3所示。
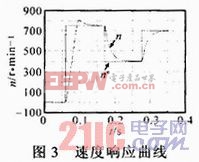
可知,第一次设定值为750 r·min-1,由零第一次到达750 r.min-1用时约0.032 s,并且从响应开始至到达稳态用时约0.1 s,超调量约为6.6%。在0.17 s左右设定值突变为400 r·min-1,在没有超调的情况下,用时约0.08 s响应达到稳态。在0.28 s左右给定值变为700 r·min-1,同样在没有超调的情况下,约用0.08 s响应到达稳态。就响应速度和超调量来看,基本满足一般的控制要求。
可知,在0.06 s处.当突加一个750 r·rain-1的速度时,给定与实际转速的差值相当大,因而kp(t)由最小值突增到最大值,然后继续保持在最大,而ki(t)则从最大骤然降为零,并保持在零处。在0.092 s左右,由于实际速度基本到达期望速度,因而,kp(t)由原来的最大值降为最小值,而ki(t)则由零突增到接近最大值,然后由于超调的产生,使得差值相对增大,因而积分作用再次减弱。比例放大作用再次增强。直至到达稳态时,kp(t)和ki(t)都趋向于一个适宜的稳态值,使系统继续保持稳定。在后面两个给定值发生变化的过程中,kp(t)与ki(t)的变化与第一个过程基本相同,在此不再赘述。由Matlab仿真的3个过程可知,比例与积分这两个增益的协调变化与预先设想的相同,并且能够使系统达到较满意的控制效果,从而验证了理论分析的正确性。
3.2 实验结果
结合上述理论分析和系统仿真,对理论进行了实验验证。图5a为速度不断变化时的速度响应曲线。可知,当期望值与起始值的差值较大时,kp(t)的作用很强,会产生足够小的超调量;而当差值较小时,则没有超调,并在约0.1 s内无静差地到达期望值。这与系统仿真的结果基本相符。图5b为速度在给定值为700 r·rain-1时的速度响应曲线。可知,从起始的100 r·min-1到达给定的700 r·rain-1,用时约为0.1 s,且只有很小的超调量。
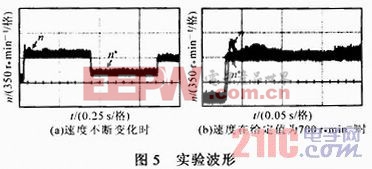
由实验结果可知,按上述方法设计的控制器能够在无需人为调节的情况下较好地满足系统的控制要求,并且与仿真结果基本相符,再次证明了理论分析的正确性。
4 结论
需要指出,此处只是以速度控制器为例介绍了上述设计方法,此方法还可用于电流控制器的设计。由上述的理论分析、系统仿真和实验验证可知,使用增益整定PI速度控制器在参数不准确和给定值频繁变化的情况下,可以简单、快捷地达到较好的控制效果,可以很好地模拟手动调节的过程,而无需人为地凭借经验调节或者是经过繁琐的计算得出,因而这种增益整定控制器的设计方法有很好的实际应用价值。












评论