公路划线机划线导向机器人的设计
公路划线机是用来在高等级公路及城市道路上划各种路面标线的专用机械。在道路的养护过程中也用于在旧标线上划新标线[1]。目前划线机种类很多,它们分别应用于不同的场合,但其共同的特点都是先通过人工标线,然后进行机械喷涂。人工标线工作量大,且工作进度较慢,精度较差。针对这种现象本文介绍了公路划线机划线导向机器人,专门用于提供划线机较准确的路线,减轻了人工标线的工作量,提高了划线的准确度。
2划线导向机器人概述
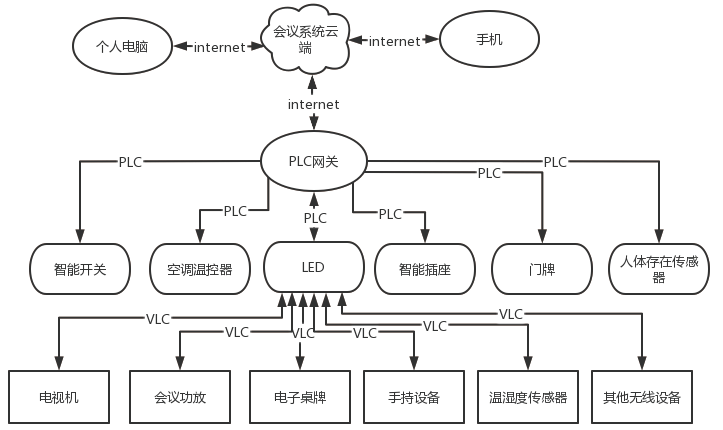
划线导向机器人的系统基本组成:导向控制系统、电机驱动履带行走系统和涂料喷涂系统。本文划线导向机器人主要用于公路中线的划线导向,机器人两端安装有超声波测距模块,分别测量公路两边的公路沿到机器人的距离,通过西门子S7-200PLC软件程序的处理后得出的信号来驱动直流电机的运动,使机器人快速地往中线上靠近,进而在中线上行进。当行进稳定后,涂料喷涂系统中的喷枪开始对地面喷洒涂料,给划线机提供较准确的标线。机器人控制示意图如图1所示。
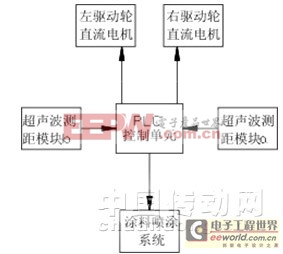
图1机器人控制示意图
Fig.1Thediagramofcontrol
3导向控制系统
导向控制系统基本组成:超声波测距模块和PLC控制单元。
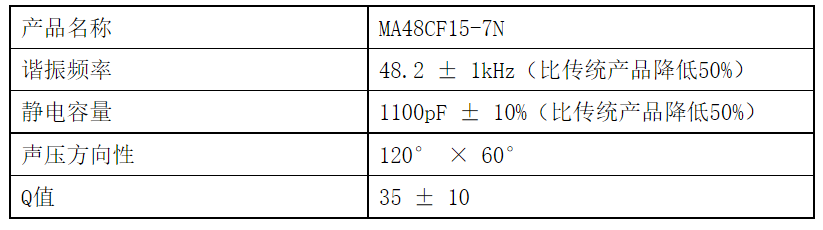
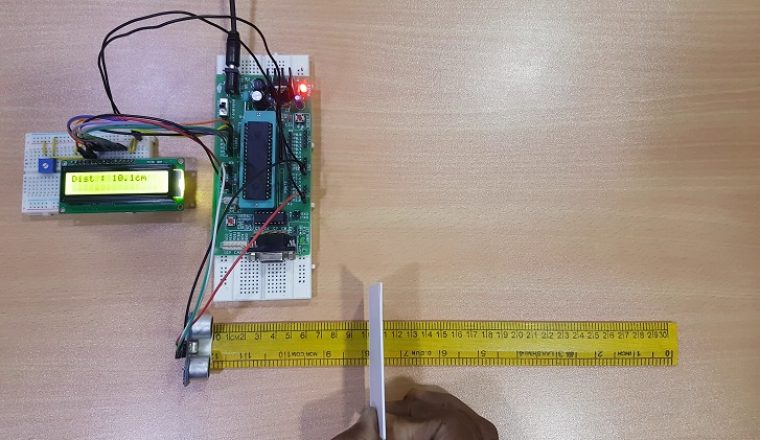
超声波测距模块一般包括硬件部分和软件部分,硬件部分包括控制单元、超声波传感器、发射和接收电路等;软件部分即是固定在控制单元中的程序。目前市场上出现的超声波测距仪,可以稍加以改进,也可以满足本文要求。目前的超声波测距仪检测距离可达到10m左右,远远满足本文的要求。
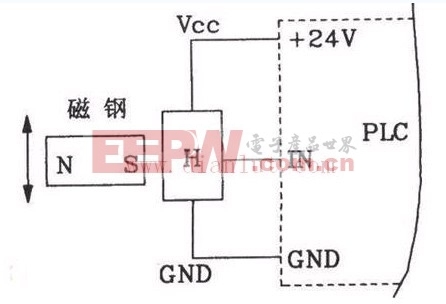
本机器人左右两端分别对称安装一个超声波测距模块,左右两个传感器同时向两边发射超声波,通过比较左右传感器发射接收的时间差值来判断机器人是右偏还是左偏,进而控制驱动轮直流电机的运动,从而是机器人在公路的中线上行进。PLC控制单元在接收到两边超声波测距模块传送的数据后,将两组数据进行比较。如果右边的数据较小,发出的超声波在右边返回的用时较短,则机器人偏向中线的右边,那么右驱动轮比左驱动轮转速快,如此不断的调整,最后机器人位于公路中线上。稳定后,控制单元将此时的超声波传回的数据储存在存储区中,以后机器人的驱动轮速度就以此时的速度匀速行进,靠传感器实时传回的数据进行调整。调整范围限制在一定的值域内,超过该值域时,电机才转动开始调整机器人与中线的距离,使其尽快在中线上行进。
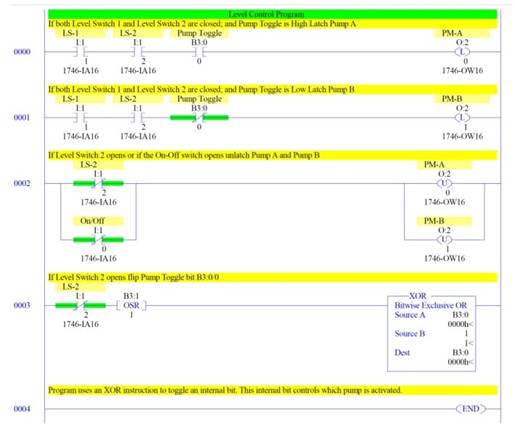
PLC控制单元软件包括:主程序、读超声波测距模块数据子程序和电机调整子程序。其程序流程图如图2所示。
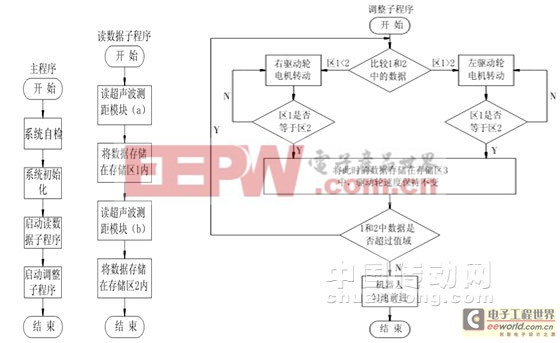
图2程序流程图
Fig.2Thechartofprogramflow









评论