飞思卡尔ISO26262 ASIL-D电子助力转向演示系统设计
ASIL等级:ASIL-D
· 安全目标2:防止电机产生死锁扭矩
确保电机不能锁死,以至司机不能正常转向。电机死锁可能由电气失效或机械失效导致。尤其在高速时,这种意外的扭矩会给司机,乘客和行人带来危险。这种危险可能源于电控单元ECU的故障,或电机及转向系统的机械故障。
ASIL等级:ASIL-D
· 安全目标3:防止系统从“安全状态”错误退出,电机产生突发扭矩
这种工况是指当EPS系统由于故障,如电机异常等原因,已经进入了所谓的“安全状态”。但是由于电气故障,EPS系统错误地从“安全状态”退出,在没有任何告警的情况下,电机重新对转向系统施加意外的扭矩,从而使司机不能按意图控制转向。
ASIL等级:ASIL-A
· 安全目标4:防止电机不提供助力
确保系统运行正常,助力施加正确。助力缺失不会导致车辆失控,因为有机械转向系统存在。一种合理的假设是:当这种故障被检测到后,显示告警信息;司机察觉后,启用“跛行回家”的行车模式,,比如降低车速等。
ASIL等级:QM
经过危险分析和风险评估后,以上四个安全目标的最高ASIL等级是ASIL-D。所以EPS系统的最高ASIL 等级是ASIL-D。
2.3 功能安全概念
为了实现系统的安全目标,对系统架构中的各个要素(Element),如传感器、控制单元和执行单元(电机),都有功能安全需求。功能安全需求主要考虑各要素的ASIL等级、工作模式、安全时间、安全状态、功能冗余即容错性能和各要素的初步架构等。它不涉及具体的硬件和软件实现细节。在EPS系统中,采用了如图2的初步系统架构,可能的功能安全需求示例如下:
· 整个EPS系统要求达到ASIL-D的要求。(系统)
· 安全状态的定义必须确保当系统出现致命故障时,电机的行为不会对转向系统不利影响。(系统)
· 系统必须在安全时间内进入安全状态。(控制单元)
· 控制单元必须包括电机控制通道和电机监控通道。(控制单元)
· 控制通道和监控通道都能获得集成于车辆接口的传感器信号。(传感器和控制单元)
· 控制通道和监控通道都能获得集成于执行单元的传感器信号。(传感器和控制单元)
· 控制通道和监控通道所用的传感器信号必须独立。(传感器)
· 控制通道根据扭矩传感器输入和其它来自车身网络的相关输入计算助力需求。(控制单元)
· 控制通道控制执行单元,产生所需助力。(控制单元)
· 监控通道根据独立的扭矩传感器输入和其它来自车身网络的相关输入,校验控制通道是否正确计算了助力需求。(控制单元)
· 监控通道根据独立的传感器输入,校验控制通道是否正确控制了执行单元。(控制单元)
· 监控通道能够独立的使系统进入安全状态。(控制单元)
· 系统电源监控的实现必须独立于电机控制通道和电机监控通道。(控制单元)
· 系统时钟监控的实现必须独立于电机控制通道和电机监控通道。(控制单元)
· 其它需求可参考图2的EPS功能安全概念。
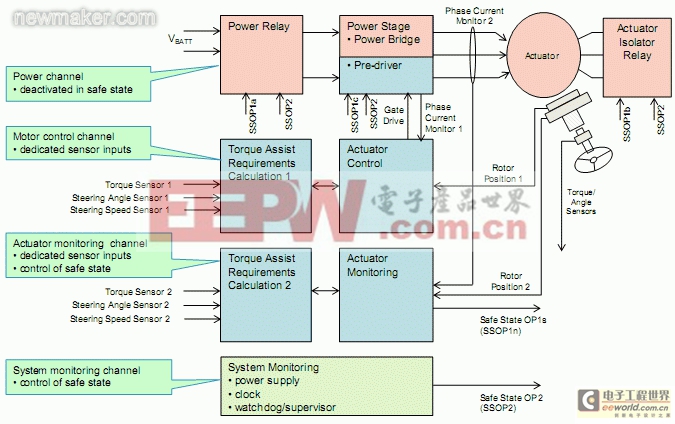
图2:EPS功能安全概念
产品开发阶段包括系统设计、硬件设计和软件设计、安全确认、功能安全评估和生产准备。下文主要介绍控制单元的设计。






评论