基于MDB/ICP协议的自动售卖系统的主控制器实现
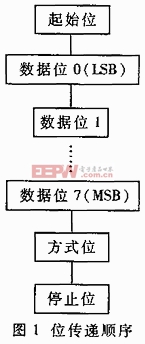 与多个外设之间通信的协议。硬币机和读钞机的标准首先是由Coinco在美国可口可乐公司的指定下开发的。这个标准于1993年被NAMA协会采用,经过一个专门的工作组修订后,于1994年被EVMMA采用。第二阶段的非现金交易标准由Debitek代表NAMA开发,并于1994年被NAMA采用。EVMMA加入了一些兼容的指令后于1994年采用。 MDB接口实际上是工作于9600波特率的主从型串行总线接口,所外围设备(例如硬币机、读钞机、读卡器等)均为主控制器(传统上称售货机控制器——VMC)的从机。所有外围设备与VMC之间的通信方式都一致。 MDB协议的串行位格式为:1个起始位,8个数据位,1个方式位与1个停止位,共11位。位传递的顺序如图1所示。其中方式位根据传递的方式不同置0或置1。在MDB总线上,VMC通过广播方式向外发送命令。第一字节为地址字节(实际上只有高5位寻址信息,低3位为对外设的指令),该字节被所有的外设读取,但只有符合地址字节所指定的外设才处理其后的数据字节,并做出反应。在VMC到外设的数据中,地址字节的方式位被置1,数据字节的方式位被置0,外设通过检验接收到的方式位确认是地址命令还是数据。当数据从外设发送到主机时,最后送出的字节方式位被置1,标志着数据发送完毕。 VMC向外设传送的指令由一个地址字节、一些可选的数据字节与一个校验和(CHK)字节构成。发送指令后,外设应答VMC的通信块可以由一个数据块和一个CHK字节组成,或者一个应答字节(ACK),或者一个无应答字节(NAK)。如果外设应答数据块的话,VMC将通过一个应答字节(ACK)、无应答字节(NAK)或得发字节(RET)应答外设传回的数据。 图2至图5为几个典型的会话例子,其中“*”表示传送时方式位置1,“ADD”表示地址字节,“CHK”表示传送数据的校验和。 2 硬件系统结构 在MDB/ICP总线协议基础上,笔者构建了一个实际的自动售卖系统,系统原理图如图6所示。VMC通过MDB总线与投币机、读钞机和读卡器交互,控制外设的运转,并从外设获得用户的支持情况。同时,VMC也负责处理与用户之间的交互,驱动液晶显示,处理键盘输入,驱动符合用户需要的电机运转出货。在本项目中,VMC还需通过MODEM自动拨号连接公司总线的服务器,将销售数据传送回公司。 如图6所示,所有MDB外设均挂在同一总线上,由总线提供24V和5V的电源,数据线与单片机的串口相连。 本项目中选用的单片机为DALLAS DS5002FP。该单片机代码级兼容MCS-51系列单片机,在使用外存的情况下仍然可以使用4个PO作为数据I/O,带外设的能力较强。但它只有一个串口,控制MDB总线和控制MODEM都需要使用串口,因此必须将串口进行复用。通过一个译码器实现选通功能。 3 MDB/ICP会话控制 将VMC与外设之间通过MDB总线的会话分为四个层次: (1)串口初始化 初始化串口时,主要工作是设置波率(9600)和传输方式(11位)。为顺利获得9600波特率,单片机采用的晶振为11.0592MHz。源代码如下(采用Franklin C51语言编写): // 一点常量定义 #define uchar unsigned char #define T_RESPONSE 0xee //*5.0毫秒*/ #define MAX_BLOCK_SIZF 36 /*数据块最大长度*/ #define ERR_TIME_OUT 0x81 /*超时*/ #define ERR_NO_MODE_BIT 0x82*/未收到最后字节*/ #define ERR_CHECKSUM 0x83 /*校验和错*/ #define ACK 0x00 #define RET 0xaa #define NAK 0xff //初始化串口 void InitSerialPort() { SCON = 0xd0; //设置串口为方式3(9bit) TMOD %26;amp;=0x0f; TMOD I=0x20; //设置定时器1为方式2 TR1 =1; //定时器1使能 TH1 = 0xfd; //设定波行率:9600 NRZ PCON %26;amp;=0x7f; //Set SMOD=0 RI=0; TI=0; }
与多个外设之间通信的协议。硬币机和读钞机的标准首先是由Coinco在美国可口可乐公司的指定下开发的。这个标准于1993年被NAMA协会采用,经过一个专门的工作组修订后,于1994年被EVMMA采用。第二阶段的非现金交易标准由Debitek代表NAMA开发,并于1994年被NAMA采用。EVMMA加入了一些兼容的指令后于1994年采用。 MDB接口实际上是工作于9600波特率的主从型串行总线接口,所外围设备(例如硬币机、读钞机、读卡器等)均为主控制器(传统上称售货机控制器——VMC)的从机。所有外围设备与VMC之间的通信方式都一致。 MDB协议的串行位格式为:1个起始位,8个数据位,1个方式位与1个停止位,共11位。位传递的顺序如图1所示。其中方式位根据传递的方式不同置0或置1。在MDB总线上,VMC通过广播方式向外发送命令。第一字节为地址字节(实际上只有高5位寻址信息,低3位为对外设的指令),该字节被所有的外设读取,但只有符合地址字节所指定的外设才处理其后的数据字节,并做出反应。在VMC到外设的数据中,地址字节的方式位被置1,数据字节的方式位被置0,外设通过检验接收到的方式位确认是地址命令还是数据。当数据从外设发送到主机时,最后送出的字节方式位被置1,标志着数据发送完毕。 VMC向外设传送的指令由一个地址字节、一些可选的数据字节与一个校验和(CHK)字节构成。发送指令后,外设应答VMC的通信块可以由一个数据块和一个CHK字节组成,或者一个应答字节(ACK),或者一个无应答字节(NAK)。如果外设应答数据块的话,VMC将通过一个应答字节(ACK)、无应答字节(NAK)或得发字节(RET)应答外设传回的数据。 图2至图5为几个典型的会话例子,其中“*”表示传送时方式位置1,“ADD”表示地址字节,“CHK”表示传送数据的校验和。 2 硬件系统结构 在MDB/ICP总线协议基础上,笔者构建了一个实际的自动售卖系统,系统原理图如图6所示。VMC通过MDB总线与投币机、读钞机和读卡器交互,控制外设的运转,并从外设获得用户的支持情况。同时,VMC也负责处理与用户之间的交互,驱动液晶显示,处理键盘输入,驱动符合用户需要的电机运转出货。在本项目中,VMC还需通过MODEM自动拨号连接公司总线的服务器,将销售数据传送回公司。 如图6所示,所有MDB外设均挂在同一总线上,由总线提供24V和5V的电源,数据线与单片机的串口相连。 本项目中选用的单片机为DALLAS DS5002FP。该单片机代码级兼容MCS-51系列单片机,在使用外存的情况下仍然可以使用4个PO作为数据I/O,带外设的能力较强。但它只有一个串口,控制MDB总线和控制MODEM都需要使用串口,因此必须将串口进行复用。通过一个译码器实现选通功能。 3 MDB/ICP会话控制 将VMC与外设之间通过MDB总线的会话分为四个层次: (1)串口初始化 初始化串口时,主要工作是设置波率(9600)和传输方式(11位)。为顺利获得9600波特率,单片机采用的晶振为11.0592MHz。源代码如下(采用Franklin C51语言编写): // 一点常量定义 #define uchar unsigned char #define T_RESPONSE 0xee //*5.0毫秒*/ #define MAX_BLOCK_SIZF 36 /*数据块最大长度*/ #define ERR_TIME_OUT 0x81 /*超时*/ #define ERR_NO_MODE_BIT 0x82*/未收到最后字节*/ #define ERR_CHECKSUM 0x83 /*校验和错*/ #define ACK 0x00 #define RET 0xaa #define NAK 0xff //初始化串口 void InitSerialPort() { SCON = 0xd0; //设置串口为方式3(9bit) TMOD %26;amp;=0x0f; TMOD I=0x20; //设置定时器1为方式2 TR1 =1; //定时器1使能 TH1 = 0xfd; //设定波行率:9600 NRZ PCON %26;amp;=0x7f; //Set SMOD=0 RI=0; TI=0; }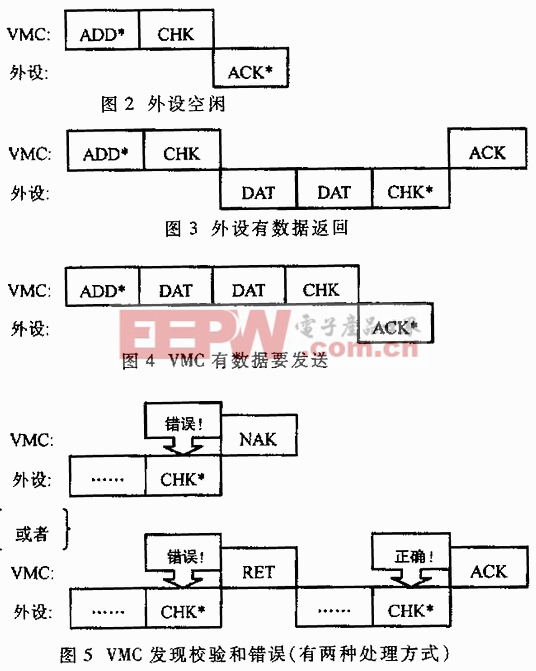 (2)字节的传送 这里需要注意的是:发送数据时要根据需要设置方式位,而接收数据时要返回方式位的值,以判断是否收完所有数据。 // 传送字节 void TransmitByte(uchar byte,bit mode) //形参:byte——准备发送的字节 // mode——预备要设置的方式位 { TB8=mode; //设置方式位 SBUF = byte; //发送字节 While(!TI); //等待发送完毕 TI=0; } //接收字节 #pragma disable uchar ReceiveByte(uchar *byte,uchar *bMode) //形参:*byte——返回接收到的字节值 // *bMode——返回接收到的字节的方式位 //返回值:0—超时,1—成功接收 { TMOD %26;amp;=0xf0; TMOD |=0x01; //设置定时器0为方式1(16位) TH0=T_RESPONSE; TL0=0x00; //设置超时门限 TF0=0; TR0=1; //定时器0使能 While (!RI %26;amp;%26;amp; !TF0) ; //等待接收字节直至超时 TF0=0; if(RI){ //已接收字节 RI=0; *byte=SBUF; //返回字节值 *bMode=RB8; //返回方式位 return 1; }else{ //超时 RI=0; return 0; } } (3)数据块的传送 这部分与下面的会话部分放在一个函数体内实现。 (4)会话
(2)字节的传送 这里需要注意的是:发送数据时要根据需要设置方式位,而接收数据时要返回方式位的值,以判断是否收完所有数据。 // 传送字节 void TransmitByte(uchar byte,bit mode) //形参:byte——准备发送的字节 // mode——预备要设置的方式位 { TB8=mode; //设置方式位 SBUF = byte; //发送字节 While(!TI); //等待发送完毕 TI=0; } //接收字节 #pragma disable uchar ReceiveByte(uchar *byte,uchar *bMode) //形参:*byte——返回接收到的字节值 // *bMode——返回接收到的字节的方式位 //返回值:0—超时,1—成功接收 { TMOD %26;amp;=0xf0; TMOD |=0x01; //设置定时器0为方式1(16位) TH0=T_RESPONSE; TL0=0x00; //设置超时门限 TF0=0; TR0=1; //定时器0使能 While (!RI %26;amp;%26;amp; !TF0) ; //等待接收字节直至超时 TF0=0; if(RI){ //已接收字节 RI=0; *byte=SBUF; //返回字节值 *bMode=RB8; //返回方式位 return 1; }else{ //超时 RI=0; return 0; } } (3)数据块的传送 这部分与下面的会话部分放在一个函数体内实现。 (4)会话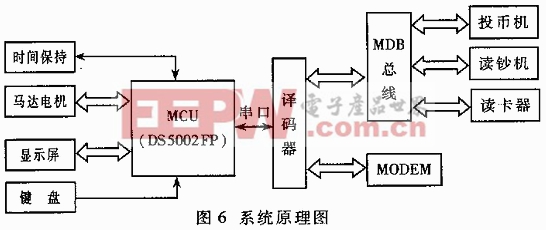 这是MDB会话控制的核心部分。根据需要传送数据包,计算校验字节,控制方式位,在时序允许的响应时间内接爱外设返回的数据,做出ACK或NAK等反应。并且按照MDB/ICP标准中堆荐的方式处理异常情况,当接受数据超时或校验和错时,重复发送命令多次,以增强容错性能。将接收到的数据返回给调用乾,并返回结果码。源程序如下: //与外设会话,在调用之前确认译码器选通MDB总线 uchar Session(uchar add,uchar dat[],uchar count) //形参:add——VMC发送的地址指令字节 // dat[]——VMC发送的数据块 // count——数据块的大小 //返回值:0——外设应答ACK //非0且小于0x80——外设应答的数据块的大小 //大于等于0x80——会话中出错 //外设应答的数据块存放在全局数组uchar recBuff[] { uchar data check,i,j,err; uchar data mode; for(j=0;j<5;j++){ //最多重复发送命令5次 check=0; err=0; TransmitByte(add,1); //发送地址字节 Check +=add; //计算CHK For(i=0;i
这是MDB会话控制的核心部分。根据需要传送数据包,计算校验字节,控制方式位,在时序允许的响应时间内接爱外设返回的数据,做出ACK或NAK等反应。并且按照MDB/ICP标准中堆荐的方式处理异常情况,当接受数据超时或校验和错时,重复发送命令多次,以增强容错性能。将接收到的数据返回给调用乾,并返回结果码。源程序如下: //与外设会话,在调用之前确认译码器选通MDB总线 uchar Session(uchar add,uchar dat[],uchar count) //形参:add——VMC发送的地址指令字节 // dat[]——VMC发送的数据块 // count——数据块的大小 //返回值:0——外设应答ACK //非0且小于0x80——外设应答的数据块的大小 //大于等于0x80——会话中出错 //外设应答的数据块存放在全局数组uchar recBuff[] { uchar data check,i,j,err; uchar data mode; for(j=0;j<5;j++){ //最多重复发送命令5次 check=0; err=0; TransmitByte(add,1); //发送地址字节 Check +=add; //计算CHK For(i=0;i











评论