基于PIC单片机的自动喷料机设计与应用
1 引言
目前,我国人工养殖业发展迅速。但是养殖方法却很落后,多数仍旧是采用传统的人工方式投放饲料,费时费料、饲料投放不均、距离不远,不便于定时定量地科学养殖。文中介绍了一种在鱼塘里自动喷料机的电路设计。经过实践证明。该自动喷料机不仅能够定时定量地喷洒饲料。而且喷料均匀,喷洒距离远,能明显节约饲料。大大提高养殖效益。
2 自动喷料机的硬件设计
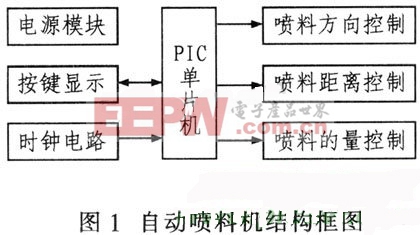
在渔业养殖中,大多数需要在早、中、晚喷洒饲料,每次喷料时间约在两三个小时。喷饲料是按喷几十秒、停几十秒断续进行,具体一天喷饲料几次、喷料时间长度、喷停时间长度,因鱼的品种、饲料的品种、鱼的养殖密度、环境气候等因素而不同,可由用户根据具体情况自行设定。为实现上述自动控制,本设计采用以PIC单片机为核心的电路,配以电源模块、按键显示、时钟电路、驱动控制(包括喷料方向控制。喷料距离控制,喷料的量控制)构成完整系统,其结构框图如图1所示。
2.1 电源模块的设计
自动喷料机硬件电路如图2所示。由220 V交流电降压后经整流滤波后得到+24 V直流电压,向驱动控制电路供电;+24 V直流电经过7805稳压后向按键显示等电路供电;当主电源有电时,主电源向各电路供电并向备份电源(3.6 V充电电池)充电;当主电源断电时,由备份电源向PIC单片机及时钟电路供电,以维持正常走时和保存预设的信
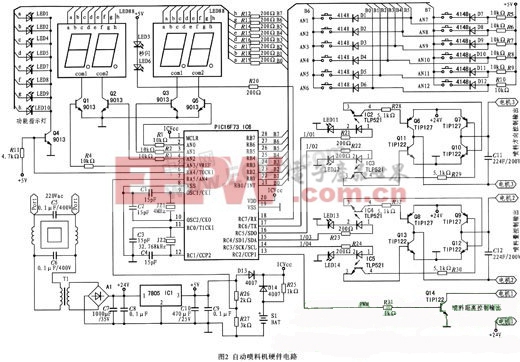
息,而显示及驱动控制部分电路则停止工作。输入到PIC单片机RA5口的模拟电压经A/D转换。若转换值小于154(对应模拟值为3 V),则单片机进入低功耗模式,此时由备份电池供电,仅保证正常走时和保存预设的信息,按键显示和驱动控制部分电路均停止工作,该情况下电路耗电流仅几十微安。
2.2 时钟电路设计
本系统要求时间相对精确,故需一个硬件计时电路,该电路主要由PIC单片机内部的16位定时计数器TMR1和外部的32.768 kHz晶体振荡器电路组成,TMR1工作在计数状态,每当计数满16 384时产生一个半秒(为方便秒闪编程)中断输出,用于精确计时。该方法电路简单、编程方便、计时精确。在低功耗状态下,TMR1能正常工作,TMR1每次溢出时唤醒单片机检测是否有主电源,若有主电源,则由低功耗状态转入正常工作状态。
2.3 按键显示电路的设计
按键显示电路共有12个按键及4位数码管,2个秒闪发光二极管及8个状态指示发光二极管。状态指示灯也可用于1位数码管与另外4位数码管进行动态扫描显示,节省I/O口。12个按键设计为2×6按键矩阵且与扫描显示的段位共用I/O口,充分利用单片机的I/O口资源,同时为避免按键和动态扫描显示互相影响,增加二极管(IN4148)进行隔离。12个按键的功能分别为设置键、右移键、上升键、下降键、喷料最大距离加键、喷料最大距离减键、喷料的量加键、喷料的量减键、喷料方向左和右位置检测键、喷料的量最大和最小检测键。8个状态指示灯分别指示:设定时间状态、设定喷料总长时间状态、设定第一二三四次喷料时间状态、设定喷料时连续喷时间长度状态、设定喷料时暂停时间长度状态。
2.4 驱动控制电路的设计
驱动控制电路是系统设计的重点。喷洒饲料的方向及饲料的量涉及到电机转动方向控制和左转、右转到位检测,而喷料的距离则涉及到电机转速的控制。
2.4.1 喷料方向控制电路
由于喷料机安装在鱼塘岸边,为了能将饲料均匀地喷向鱼塘,要求喷料方向不断地转动。即由左到右,再由右到左,如此反复。喷料的方向是由一个功率为几十瓦的小直流电机驱动。本电路采用功率管构成桥式结构控制电机正反转,另配合两个行程开关(电路中的按键)检测是否转动到极限位置,避免电机转动到极限位置还继续工作,从而损坏电机或机械装置。当I/O1和I/O2为00时,Q6、Q7、Q1O、Q11四个功率管都截止,加在喷料方向电机上的电压为O,电机不转。当I/O1和I/O2为01时,Q7、Q11导通且Q6、Q10截止。当I/O1和I/O2为10时。Q7、Q11截止且Q6、Q10导通,这两种情况流经喷料方向电机上的电流互为相反,电机转动方向也相反。当I/O1和I/O2为11时,Q6、Q7、Q10、Q11四个功率
管都导通,+24 V电源经Q7、Q11和Q6、Q10到地,此时电机不转,但Q6、Q10和Q7、Q11导通时内阻很小,流过的电流很大,会损坏功率管.处于禁止状态。
2.4.2 喷料量控制电路
鱼类对饲料量的需求因鱼类品种、养殖密度、环境气候等因素不同而不同,因此要对喷洒饲料的量进行控制,由用户根据不同情况设定。其工作原理是由一个小功率减速电机带动饲料箱口开启的大小,该电机在正反转极限位置检测按键的配合下正反转工作,其电路原理同喷料方向的控制电路。
2.4.3 喷射距离控制电路
为了把饲料均匀喷洒到池塘中,不仅要求喷料方向要左右转动,而且喷料距离也要由近而远或由远而近地变化喷洒。喷料最远距离可根据池塘的大小进行设定。饲料的喷洒是由压缩空气吹射而完成,喷料的距离由压缩空气的速度决定,而压缩空气的速度则由电机转速而定。利用单片机输出PWM信号,该信号的占空比决定了电机的转速,占空比越大电机转速越快,反之越小。因此,该控制方法简单实用,可满足设计要求。
3 软件设计
本系统软件采用模块化设计,同时辅以看门狗、软件陷阱、软件冗余等措施提高系统运行的可靠性。
为了方便修改,多人配合完成,本系统软件分为实时时钟模块、按键扫描模块、扫描显示模块、正常工作模块、设定时间模块、设定喷料时间长度模块、设定第一二三四次喷料时间模块、设定喷料时连续喷时间长度模块、设定喷料时暂停时间长度模块。主程序采用散转结构便于修改和提高程序运行可靠性。主程序流程图如图3所示。

4 抗干扰设计
系统共有三台电机工作,会产生较强的电磁干扰。这些干扰信号很可能导致系统死机、程序乱飞、破坏系统参数等不正常现象,因而在硬件和软件上都相应地采取了一些抗干扰措施。
4.1 件抗干扰
控制系统的电源输入端接入电源滤波器,滤除电网中的高次谐波和脉冲干扰。单片机选型时选择带硬件看门狗的型号,或者通过外加看门狗电路,能有效地监视程序陷入死循环故障。在每个器件的电源输入端与共地端并联一只0.1μF去耦电容。PCB板布线时注意数字地和模拟地分开布线,大电流电源线应单独布线,PCB板空白位置采用大面积覆铜设计。
4.2 软件抗干扰
第一,软件冗余。对任意的输出信号和设置均不断重复刷新,且周期设定为4 ms。可以有效地避免干扰信号对输出信号和设置等关键数据的干扰。
第二,软件陷阱。软件陷阱技术是通过跳转指令强行将捕获到的乱飞程序引入复位地址0000H,使程序纳入正轨。在各程序模块之间和未使用的程序空间设置软件陷阱可以有效地抑制程序乱飞,使程序运行更加可靠。
5 结束语
该自动喷料机已开始批量生产,用户反映本机不仅可以满足功能要求,而且可靠性高、故障率低、使用效果良好。












评论