灵活避障 快速循迹
智能救援车是机器,必须给它安装各种传感器,车子才能感知外边的精彩世界,按照"大脑"即微控制器的控制完成相应的任务。在完成智能救援车单片机最小系统的基础上增加避障电路、循迹电路,智能救援车就能按要求走路了。
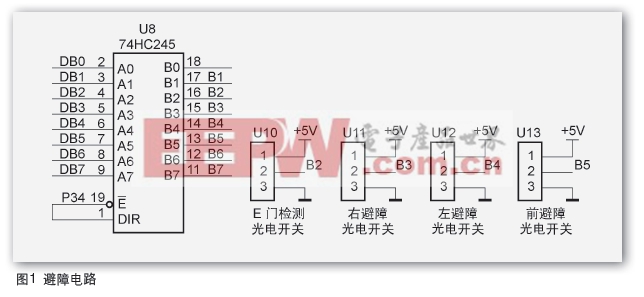
一、避障电路(见图1)
避障电路采用漫反射式光电开关进行避障。光电开关是集发射头与接收头于一体的检测开关,其工作原理是根据发射头发出的光束,被物体反射,接收头据此做出判断是否有障碍物。当有光线反射回来时,输出低电平;当没有光线反射回来时,输出高电平。单片机根据接收头电平的高低做出相应控制,避免小车碰到障碍物。由于接收管输出TTL电平,有利于单片机对信号的处理。
避障电路由双向总线驱动器U8(74HC245)、E门检测光电开关U10(E3F-DS30C4)、右避障光电开关U11(E3F-DS30C4)、左避障光电开关U12(E3F-DS30C4)、前避障光电开关U13(E3F-DS30C4)组成。4个光电开关的安装:底层最前面一个光电开关U13检测前方障碍物,左侧光电开关U12检测左侧障碍物,右侧光电开关U11检测右侧障碍物,上层右侧光电开关U10负责检测场地的E门,4个光电开关配合完成避障和寻门的作用。具体的安装位置见图3。
调试:
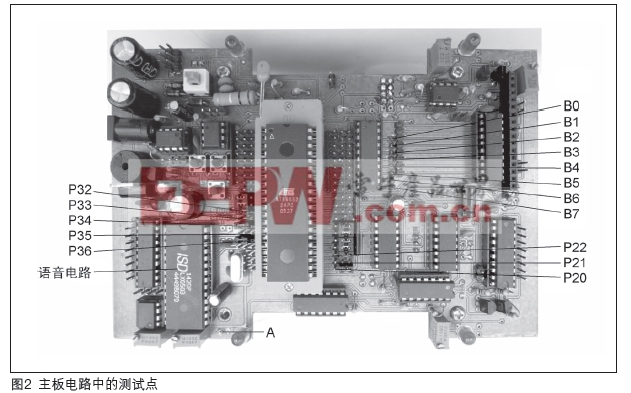
1.为保证绝大多数情况下智能救援车行走在道路中间,左右避障光电开关探测距离应保证一致。具体方法是:左右避障光电开关在装车之前接5V电源,调节光电开关的微调电位器,使障碍物在光电开关的前方距离为8cm时,光电开关输出低电平,测试点为B3、B4,如图2所示。测试方法见图4。
2.前避障光电开关用于前方障碍物检测,为保证前方障碍物检测的可靠性应作相应调试:调试方法与要点1方法相同,测试点为B5,如图2所示。
3.E门避障光电开关专门用于场地E门的检测,调试方法与要点1相同,使障碍物在光电开关的前方距离为10cm时,光电开关输出低电平,测试点为B2,如图2所示,各避障光电开关的检测距离如表1所示。

二、循迹电路(见图5)
智能救援车的循迹采用2个光电开关U15(E3F-DS30C4)、U16(E3F-DS30C4)来完成,其安装图见图5。当光电开关检测到浅色物体时,光线反射较强,输出低电平。当光电开关检测到深色物体时,光线反射较弱,输出高电平。单片机根据2个光电开关电平的高低做出相应控制,实现循迹。图7所示为智能救援车的循迹偏左时的状态:液晶显示left;右侧发光二极管亮,指示下一步车要右转。图8所示为智能救援车的循迹偏右时的状态:液晶显示right;左侧发光二极管亮,指示下一步车要左转。


调试:
1.为保证智能救援车循迹的可靠性,经测试左右循迹光电开关作如下调试:左右循迹光电开关在装车之前接5V电源,调节光电开关的微调电位器,使光电开关在循迹线的上方距离为7cm时,光电开关输出低电平,电平测试点为B6、B7,如图2所示;距离测试如图10所示。
2.因循迹线采用宽度为20mm黑色线条,为保证循迹的可靠性,用于循迹的2个光电开关的发射头应排在内侧,接收头在外侧,发射头中心点间距为18mm,左右循迹光电开关距黑线边缘1mm。如图5所示。
3.循迹光电开关距离循迹线实际距离为2mm,如图10所示。左右循迹光电开关测试点及距离见表2。这就是避障、循迹电路,只要选择好避障、循迹电路用的漫反射式光电开关,照图1和图6接线;调试方法得当,智能救援车就能避障、循迹。
图8 循迹偏右














评论