基于ARM的数控算法图示仪设计
在数字控制的研究中经常需要检测多轴驱动器输出脉冲,以了解算法、插补脉冲、运动轨迹及其三者之间的关系。采用普通示波器虽然可以查看脉冲,但由于多数示波器是基于两轴设计的,对三轴和多轴的情况进行观察时操作很不方便,并且不能反映出脉冲和运动轨迹之间的关系。此外,在数控人才培训的过程中,初学者通过轨迹仿真这一过程来理解和分析整个机床各机构的工作原理具有一定的困难,要再进一步分析插补脉冲和机床运动之间的关系难度更大。
在此设计了一种基于ARM嵌入式处理器的专用数字图示仪,能帮助仅具有基本操作知识的使用者,直观清楚地了解插补过程中各轴脉冲的关系和对应算法下刀具运动的轨迹。
1 系统硬件设计
系统以采用NXP公司的ARM7 LPC2136高速处理器作为核心处理硬件,该处理器体积少,功耗低,价格便宜,性能较高,I/O资源丰富,运算速度满足系统需求。根据功能的设计要求,系统的硬件组成划分为面板控制模块、液晶显示模块、核心处理单元和运动控制模块4大部分,如图1所示。
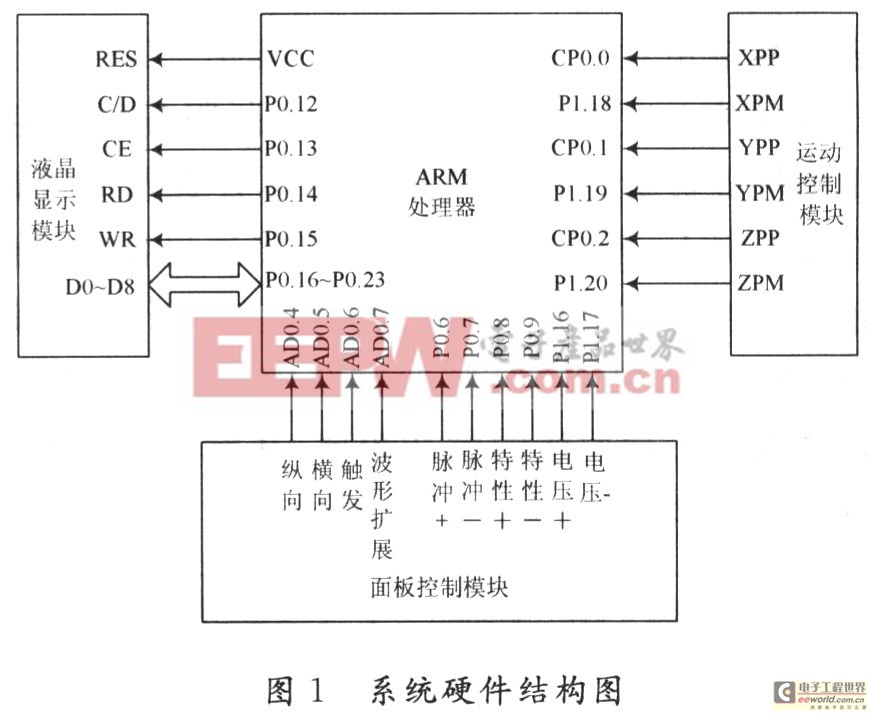
面板控制模块是由电位器、琴键开关和扭置开关等组成的简单电路,供使用者进行输入设置和调整。ARM处理器通过A/D采样和电平检测,获取电位器分担的电压和各个开关的状态,从而获取输入信息。之后根据输入信息处理,及时调整液晶屏幕上的显示,实现示波调整和观测内容切换的功能。液晶显示模块采用的是金鹏电子生产的OCM 128×128液晶显示屏,其成本低,体积小,信号处理简单,驱动技术成熟,十分适合本系统的应用。液晶屏的地址和数据共用数据总线,通过专用端口(如 C/D,CE,RD,WR等)控制数据和命令的输入与输出,其接口关系和时序简单明确,在ARM处理器上编写驱动程序十分简单。运动控制模块基于专用运动控制芯片MCX314,它拥有4轴(x,y,z,μ轴)驱动能力。MCX314芯片向步进电动机驱动器输出高低电平来控制电机的转动方向;输出变频脉冲信号来控制电机的转速。在一定的频率范围内,芯片输出脉冲频率越高,电机的转速越高。ARM处理器对MCX314的输出脉冲进行捕获,获取脉冲的时延,准确测得各轴的频率值,再通过软件算法将插补脉冲与刀具的运动速度和运动方向结合起来,产生运动轨迹数据,通过显示器模拟出来。从而直观地显示出脉冲插补和运动轨迹的对应关系,达到预期的实验效果。
系统的具体实现上,MCX314输出的信号分别为方向信号(高低电平)和脉冲信号,PP代表脉冲;PM代表方向;z,y,z分别对应各方向轴。液晶屏采用 I/O方式驱动,ARM处理器由P0.12~PO.15端口输出控制信号,由P0.16~P0.23端口写入或读取数据。显示波形的纵向增益、横向增益、触发电平及波形的扩展分别通过4个不同的电位器控制,ARM处理器对电位器上的电压进行A/D采样获取输入信息。另外,还设计了脉冲、特性和电压测试,以扩展该数字图示仪的应用场合。
2 软件系统设计
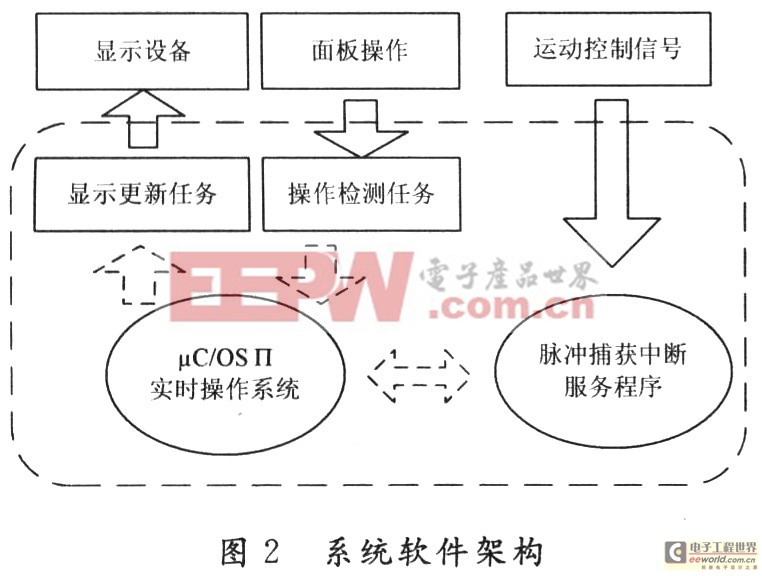
软件系统由运行在实时操作系统μC/OS-Ⅱ上的两个任务和独立于操作系统的一个中断服务程序组成。显示更新任务负责将传人数据以图形方式及时准确地显示在显示屏上;操作检测任务负责将外界各项操作的电平信号转换为一定格式的数据传递给操作系统的其他任务,以便下一步处理;脉冲捕获中断服务程序负责计算运动控制芯片发送的脉冲频率,并检测方向电平的状态,确定电机转动方向。系统软件架构如图2 所示。








评论