基于MSP430单片机的PID参数整定义
4 PID参数整定仪的软件设计
4.1 PID参数整定仪主要程序模块
在工程实际应用中,不仅需要完成硬件的相关设计与测试,还必须根据需要进行软件的设计和调试工作,所以在设计出符合要求的硬件电路的基础上,还要进行软件系统的设计和调试。本控制器软件部分主要包括以下程序模块。
(1)系统的初始程序模块。用来进行系统的初始化,包括设定初始状态值和参数,确定A/D初始工作参数,检测主电路是否上电和是否允许系统启动运行等等。
(2)键盘扫描程序模块。读取键盘输入值,包括PID初始设定值、系统设定值及采样时间等等。
(3)采样程序模块。用来对信号进行采样,采样过程要进行滤波,减少噪声干扰对采样数据的影响,最后检测采集的数据是否包含了对象足够多的信息,清除不合格的采样数据,保证所采样数据的质量。
(4)模型辨识模块。根据采样数据采用相关系数辨识法辨识出系统的数学模型,使辨识的模型与原模型有较好的线性相关度。
(5)参数整定模块。根据辨识出的系统模型采用相关的整定算法计算出新的PID参数值。
(6)LCD模块。将相关的数据,像设定值、整定模式以及PID的参数值等,显示在液晶屏上。
整个系统的程序结构框图如图4所示。
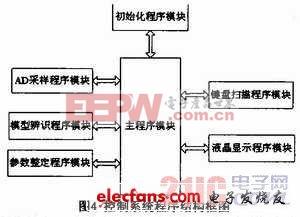
上面模块还要进行详细划分,每个模块之间的耦合很少,这样就可以独立编程、调试,提高了软件开发的模块性。
4.2 PID参数整定仪的总体工作流程
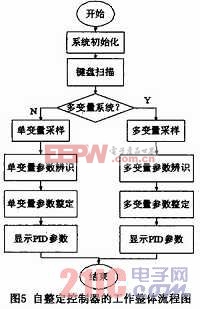
图5是自整定控制器的工作流程图,用户输入设定值,然后对过程的输入量u和输出量y进行采样。对采样的数据进行处理,并计算出最佳的PID参数整定值。整定具体过程如下:
(1)通过控制面板设定采样时间及设定值以进行采样。
(2)将采集的数据处理后得到辨识所需要的10~20个点。
(3)运用基于频域的模型辨识算法对系统进行辨识,得到系统的模型。
(4)根据模型采用相应的辨识算法计算PID参数值。
(5)在LCD上显示新的PID参数。
5 小结
介绍了本参数整定仪的各功能模块,并且进行了硬件及软件设计。此整定仪集单变量和双变量整定功能于一身,适合于任何使用PID控制器的场合,不过只有在过程获得平衡状态时辨识方法才可使用。此整定仪整定出的PID参数在LCD上显示。工作人员只需将整定出的新参数在系统中进行设置。此过程简单实用,方便工作人员操作,并且由于设计小巧,便于工作人员随身携带。


评论