Freescale单片机在电池管理系统中的应用
2.3 均衡模块
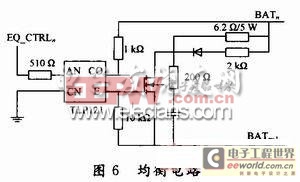
根据实时采集的数据,当电池管理系统认为某一单体电压BATn需要均衡时,给出均衡控制信号EQ_CTRLn,光耦闭合,MOS管导通,均衡电路启动,如图6所示。
2.4 CAN通信模块
CAN通信是整车与BMS之间、BMS主控制模块和子模块之间的信息桥梁。子模块将采集到的单体电压和温度值通过CAN总线上传给主控模块,主控模块通过CAN总线给子模块下达均衡命令;主控模块将电池参数发送给整车,整车控制器通过判断决策能量分配。Freescale 9S12系列单片机已经集成CAN模块MSCAN,外扩引脚CANTX和CANRX。还需要PCA82C250来作为驱动芯片,如图7所示。

3 分布式电池管理系统的软件设计
电池管理系统软件以CodeWarrior for HCS12V4.7为开发环境,采用C语言编写,包括了主控制模块和子模块两个部分的软件设计。
3.1 主控制模块
主控制模块的任务主要有:A/D转换与数据处理任务、整车CAN接收任务、整车CAN发送任务、系统监控任务、SOC与能量估算任务以及均衡处理任务。中断有:A/D采集中断、定时器下溢中断、CAN接收中断。

如图8所示,系统初始化工作完成后,软件以模/数减法计数器的下溢中断来确定系统的执行周期,计数周期为5 ms。在模/数计数器前一次下溢中断程序中,选择电压采集通道,并查询整车CAN接收;经5 ms在本次下溢中断到来后,中断服务程序进行A/D转换的启动,转换完成进入A/D中断,开启其他任务的执行,如此循环交替进行。根据整车控制策略,CAN上的电池状态数据每帧的刷新周期为10 ms,因此设置下溢中断的时钟节拍为5ms,相应地,以上所有任务的执行周期均为10 ms。








评论