优化ROADM的嵌入式控制
由于这些技术正处于快速演进的过程中,而哪种技术具有绝对优势还无法预见,所以系统集成商必须进行模块化设计,以便以后用新的器件作替换时,需要重新设计的工作量最小。最后,为了满足一些性能、容量要求较低,而成本要求较高的需求,控制体系必须在去掉某些器件后仍能正常运行。以上所述不仅对接口的一致性提出了一定程度的要求,而且要求尽可能对下层功能进行抽象,以便对其余节点提供统一的接口。
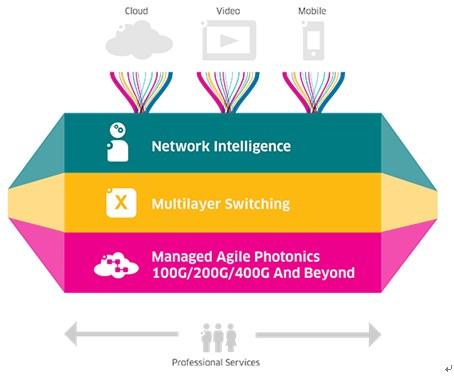
图2是ROADM节点处的各种嵌入式控制智能。这里的ROADM是基于WSS技术的。

图2
嵌入式控制包含几个不同的控制机制和层次。设计者可以自己集成这些功能,不过这样做复杂性和器件成本都很高。
所谓“嵌入式控制智能”,顾名思义,它的控制电路对于电路组件和光器件来说是处于本地的。根据光模块提供智能的层次的不同,控制电路可以在电路组件的处理器上工作,也可以在光模块内部的处理器上工作。一共有三种本地控制电路。第一种控制电路,由于所需的所有激励信号都来源于器件,比如激光器的电流和衬底的温度,所以它处于本地。第二种情况是:控制所需的带宽很宽,排除了电路组件之间通信的可能,所以也只能在本地完成控制功能。第三种情况是:控制是在器件层发生的,但是需要高层的合作才能实现控制的功能。比如控制目标的设定,根据系统的状态(如VOA的设置和EDFA的增益)改变控制行为等。
上述的本地控制是在一个单独的光器件或者模块内部进行的,而协调控制层的任务则是把多个不同的模块和控制功能捆绑起来,使之成为一个可以工作的ROADM系统。这一层的具体功能包括:
●把远程反馈信息导入本地控制电路。
●监测本地控制电路的运行状态是否满足规定。
●在启动、关机和故障时协调各个本地电路之间的工作。
●根据节点的配置和状态为下层的子系统设定运行任务(如:上下路业务的协调和上路业务的功率控制)
●当应用多点控制电路时,协调本节点和其它节点的工作。
告警和事件处理层根据运行、管理、维护和业务配给(OAMP)系统设置的触发点生成事件,聚合本地控制和协调控制功能产生的事件,并负责解除绑定、系统验证、事件屏蔽和优先级设置。
OAMP层提供人机接口的所有必需功能。OAMP层为本地脚本接口或者远程管理系统提供命令的翻译,它把命令解析成为ROADM节点内部的配置信息和查询操作。OAMP层还负责由于系统配置改变而引起的通信事件和告警,它通过北向接口把消息发送到管理系统或者本地的脚本接口。另外,这一层还协助完成系统软硬件的在线升级。
图2描述的是传统的开发模型,系统集成商使用分立的或者低级的光器件集成一个ROADM系统。系统集成商负责各个层次控制智能的开发工作,包括本地控制、协调控制、告警处理、通信和OAMP。集成商对于平台开发拥有完全的控制权,通过定制开发每一个光器件的控制程序和接口最有效地实现整个系统。
这种开发模型可以降低材料成本,但是因为一个系统中包括各种各样的技术,所以这种开发模型需要在控制系统的开发方面注入相当大的投资。由于资源有限,缩减运营开销的压力也越来越大,所以ROADM的开发工作进行起来非常艰难。现在,希望开发ROADM的设备商(即使曾经有过几家具有这种能力)已没有几家能够支付得起这笔高额的内部开发费用。向供应链上端转移。尽管存在着种种限制,但是为了不放过ROADM这个机会。一些设备商开始发动他们的合作伙伴帮助他们填充产品线上的这项空白。而另一些设备商则求助于光器件提供商以降低开发的风险。和光网络业外包的趋势相同,设备商们把器件提供商推向价值链的上端,使其分担更多ROADM开发的风险。




评论