基于ATmegal28L的智能探测车的设计与实现
3 软件设计
系统软件的主要功能是:能够根据传感器信息正确避开障碍物:小车与PC的无线通信;预先设定路线;测量物体的大小。为了提高小车避障的智能性,软件设计采用了神经网络自学习。软件设计的重点在于小车的神经网络训练程序和小车与PC机的无线通讯程序。
3.1 神经网络训练程序
BP神经网络应用广泛,具有较好的分类和记忆功能,同时有很强的容错性和鲁棒性。采用两层前向BP网络实现多传感器信息的融合,输入层有6个节点(分别对应6组传感器。其中超声波传感器测得距离在30 cm之内记为1),输出层有4个节点(前进F、左转L、右转R、后退B)。选取的输入输出样本为: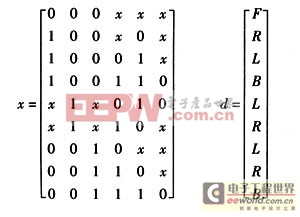
样本确立后,需要进行网络训练。网络训练就是对网络的连接权系数进行学习和调整,使该网络实现给定的输入输出映射关系。权系数修改按照式
(1)进行:
uij(t+1)=uij(t)+λ[dj(t)-yj(t)xi(t)+α△uij(t-1) (1)
式中:λ表示学习速率(取0.3);α表示学习动量(取0.3);dj(t)和yj(t)分别表示j单元在t时刻的目标输出和实际输出;xi(t)表示单元i在t时刻的输入;△uij(t-1)表示前一次迭代中;;单元i和J连接权系数更新增量。
BP网络算法采用C语言编程,训练好的网络权系数存放于Flash内存之中。采用的是离线训练方式。
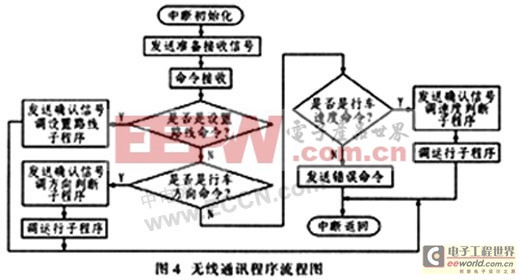
3.2 小车与PC机的无线通讯程序
PC机在小车行驶过程中可以通过无线通讯对小车进行控制。通讯采用中断的方式,流程图如图4所示。
|
4 结束语
本文讨论了基于ATmega128L的智能探测车的设计思路,对系统中的各个模块接口作了简要描述,利用神经网络来增强小车的智能性,并提出了系统软件的总体设计思想。该电路各部分功能模块化,易于调试,并且容易扩展其他功能。本设计的应用前景广阔,可用于肮脏、危险等不适宜人类工作或者是人类难以到达的环境,可作为特殊应用器材的载体工具,为无线检测、信息传输及远距离控制技术提供了一个很好的应用平台。



评论