基于ATmegal28L的智能探测车的设计与实现
2.2 JTAG接口电路
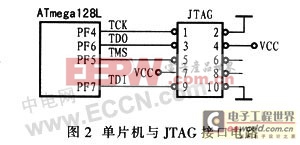
在设计系统中,引出ATmegal28L的JTAG接口进行在线编程和下载,以方便调试和程序更新。对AVR器件进行编程是由JTAG端口的TCK、TMS、TDI和TDO实现的。通过JTAG可以实现如下的编程功能:
(1)Flash编程及校验;
(2)EEPROM编程及校验;
(3)熔丝位编程及校验;
(4)锁定位编程及校验。
电路如图2所示。
|
2.3 电机驱动电路
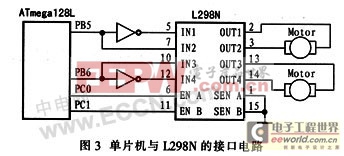
系统采用直流电机驱动两个前轮实现小车的前进、后退、左转、右转。ATmega128L具有2个带预分频器和比较模式的8位定时/计数器、2个扩充的带预分频器和比较/捕获模式的16位定时/计数器、2通道8位PWM、6通道2~16位精度:PWM。这里采用ATmegal281。的16位定时/计数器l来产生两路PWM信号,分别接1298N的EN A和EN B,用于控制两个电机的起停、转向及速度。它工作在相位和频率修正PWM模式下,该工作模式可以产生高精度、相位与频率都准确的PWM波形。通常用OCRnA作为TOP值。改变TOP值即可改变PWM信号的占空比,从而改变电机转速。
L1298N是SGS公司生产的恒压恒流桥式2 A驱动器件,内部包含4通道逻辑驱动电路。1298N与单片机的连接如图3所示。
|
系统采用了步进电机来控制超声波旋转平台的上下左右运动,驱动电路与此类似。
2.4 超声波测物电路和红外测障电路
系统采用一组超声波传感器和五组红外传感器感知环境信息。超声波通过一个可以上下左右旋转的平台安装在小车的正前方,用来测量物体的大小。在普通行车中,超声波传感器的用途和红外传感器一样。红外传感器分别安装在小车的左前方、右前方、左侧、右侧和后面。本系统利用ATmegal28I。产生40 kHz的脉冲信号,驱动发射电路发送超声波。红外传感器测量小车在五个方向的一定距离内(本系统为30 cm)是否有障碍物,辅助小车避开障碍物。
2.5 无线发射接收电路
本系统选用集成度较高的无线数据传输产品nRF401来实现PC与小车的无线通信。 nRF40l收发模块的主要特点:工作频段为433MHz;采用FSK调制,抗干扰能力强:频率稳定性好;灵敏度高,功耗小;具有多频段切换功能。
通过ATmega128L的PA5(AD5)控制PWR UP。当PWR-UP="l"时,表示进入正常工作模式:当PWR-UP="0"时,表示进入接收待机模式。PANAD6) CS="1"时,表示中心频率为434.32 MHz,当CS="0"时,表示中心频率为433.92 MHz。PA7 (AD7)控制nRF40l的TXEN端,当TXEN="1"时,表示进入发送模式,当TXEN="0"时,表示进入接收模式。数据输入端DIN与ATmegal28L的PEO(RXD0)相连。数据输出端DOUT与ATmegal28L的PEl(TXD0)相接。
2.6 充电电路
由于电机启动时瞬间电流很大,且PWM驱动的电动机电流波动较大,导致车载电源电压不稳,从而影响其他电路的正常工作,所以系统采用双电源供电的方法。将电机驱动电源与单片机及传感器电源完全隔离开来,利用耦合器进行连接。



评论