摩托车发动机电控单元ECU的开发
由于MC68HC908SR12的时钟基(TBM)模块只能产生约2ms的定时中断,而原有电控系统的背景软件执行时间必须在7.81ms以上。因此,在本ECU软件中,将背景执行程序在四次TBM中断时间内执行。MC68HC908SR12的中断优先级是固定的,故需要根据软件的中断优先级的不同来设计硬件。并且由于MC68HC908SR12没有脉冲累加器中断,因此将经过转速处理电路处理过的转速信号同时接入到TIM1的两路输入捕捉端口,以下降沿捕捉的方式发生。其中T1CH0负责进行齿缺的寻找,是优先级最高的中断。当寻找到齿缺后,即实现了电控系统与发动机的运转同步之后,就不再使能此中断,切换到另一路T1CH1,当数到相应齿号时,就使能与点火、喷油相关的中断。为了不累积误差,需要在快到齿缺时,重新切换到T1CH0。点火使用T2CH0,喷油使用T2CH1。
转速处理模块
转速处理模块的软件示意框图如图4所示。转速脉冲信号是由发动机曲轴位置及转速传感器获得的,由于传感器的触发盘(如图5所示)有一个不同于其它的大齿,因此,触发盘转动一周所产生的脉冲信号中也存在一个宽度较大的脉冲。利用这一点,将此脉冲信号经过软件的处理之后,不仅可以用来提供发动机工况所需的转速,还将提供电控系统工作所需的曲轴位置信息,从而按照发动机时序控制的要求在确定的曲轴转角处实现点火和喷油输出。
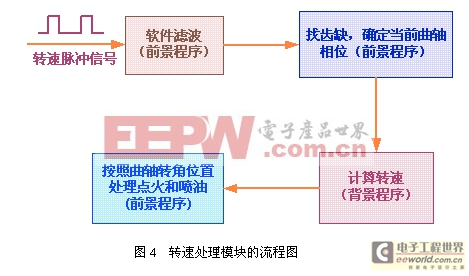
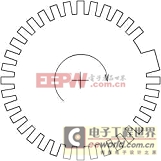
图5 发动机曲轴位置及转速传感器的触发盘
点火控制模块
点火控制模块由前景时序控制和背景点火工况判别及背景点火计算程序组成,如图6所示。背景工况判别程序监测发动机转速、负荷、壁面温度等工况参数,划分不同工况段并设置相应的工况标志位,控制前景程序以特定的点火模式工作。背景点火计算程序计算初级线圈闭合时间和点火提前角,并对初级线圈闭合时刻进行更新设定。
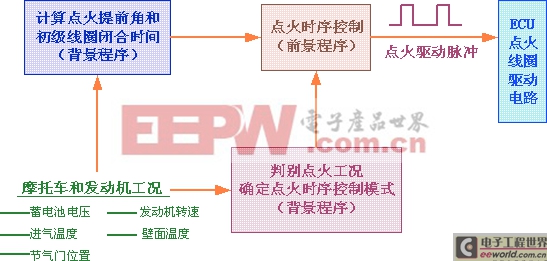
图6 点火控制模块的流程图
点火初级线圈闭合时间决定点火能量,它受线圈规格、蓄电池电压以及线圈温度影响。闭合时间过长会损坏线圈及其驱动器件,过短则可能导致失火。
拖动工况时初级线圈的闭合时刻固定在曲轴的某一转角,且其闭合时间约为曲轴转过2齿或4齿所对应的时间(随蓄电池电压不同),而运行点火工况下,不仅要考虑到发动机转速和蓄电池电压对计算初级线圈闭合时间带来的影响,而且还要根据转速和负荷的变化来调整,从而获得最佳的初级线圈闭合时间。
软件中,运行点火工况下,初级线圈的闭合时间计算公式如下:
闭合时间 = 动态闭合时间 + 稳态基本闭合时间 + 初级线圈闭合时间蓄电池电压补偿
由于拖动工况下发动机转速变化很快,而且会迅速满足运行点火工况的要求从而脱离拖动工况,故拖动点火角只以转速为自变量,不考虑其他任何修正。
运行点火工况时,点火提前角的计算则是不仅由节气门开度TPS和发动机转速RPM确定主点火提前角,更要考虑到多种因素的影响,进行各项修正。对计算得到的点火提前角,不仅需要限定最小值和最大值,而且还要对点火提前角的变化率进行限制,避免发动机性能出现突变。
点火提前角的计算公式如下:
运行点火提前角 = 主点火提前角 + 壁面温度修正 + 充气温度修正+ 大气压修正 + 功率加浓修正
发动机起动成功后,其壁面温度将逐渐升高。为了保证摩托车能在稳定怠速下运转,可以通过调整此壁面温度修正量来调整怠速时的点火提前角。充气温度修正项与壁面温度修正项的作用相同,功率加浓修正是指发动机工作在功率加浓工况(高速大负荷)时点火提前角所需要的修正项。根据背景程序计算得到的这些数据参数及控制标志,在前景程序中将完成点火初级线圈闭合、断开时刻的设定和点火驱动脉冲的输出。 因为初级线圈对闭合时间的要求是基于时间的,而点火驱动脉冲的产生是基于曲轴转角的,因此不同转速段下,点火驱动脉冲会跨越不同的曲轴转角。为提高点火提前角的控制精度,软件中设置点火时刻的基本原则是从34X信号获取尽可能多的曲轴瞬时转速信息,使从角度到时间的转化关系更加精确。同时,还可获得更高的可靠性。但主芯片的程序代码的执行速度又限制了在高转速段(如转速 > 8000r/min)频繁利用前景事件中断获取曲轴瞬时转速信息,因此为了满足实时性的要求,将对准确性和可靠性的要求进行相应调整。在背景程序中,按发动机转速(指平均转速)划分出4种点火时序控制模式,即拖动、低速、中速及高速模式。在拖动和低速模式下,由于转速很低,准确性、可靠性和实时性的要求都可以得到满足。但随着转速逐渐提升,准确性和可靠性的要求逐渐下降,实时性成为最重要的要求,到高速模式时,实时性和可靠性又成为最主要的要求。



评论